Home
mANYpulator – Mobile Manipulation (Martin Wermelinger)
Robotic Systems Lab: Legged Robotics at ETH Zürich
2 มี.ค. 2018
การดู 16,219 ครั้ง
Using ROS with other Simulators (Dominic Jud)
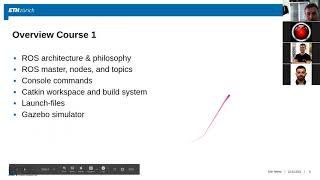
Programming for Robotics (ROS) Course 1
Building a ROS Robot for Mapping and Navigation #1
What are virtual particles?
Boston Dynamics NEW Humanoid Robot SHOCKS The ENTIRE Industry! (Atlas 2.0)
Perturbation-Resilient Bipedal Locomotion via Signal Temporal Logic Guided Model Predictive Control
A framework for robotic excavation and dry stone construction using on-site materials
Programming for Robotics, Lecture 1: Introduction to ROS
DTC: Deep Tracking Control
CRL Legged Robotics Team in Swiss Robotics Day 2023
CDC 2021 Presentation - Force-and-moment-based MPC for Highly Dynamic Bipedal Robots
ANYexo 2.0: A Fully Actuated Upper-Limb Exoskeleton - Presentation for IEEE CASE 2023
Programming for Robotics (ROS) Course 2
ROS NAVIGATION IN 5 DAYS #1 - Course Overview & Basics Concepts
Tutorial: Gait and Trajectory Optimization for Legged Robots
Building a Robot Operating System for the Future
Building a Legged Robot with ROS (Péter Fankhauser)
Programming for Robotics (ROS) Course 4
Programming for Robotics (ROS) Course 3
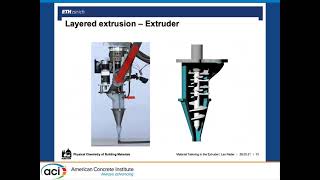
Material Tailoring in The Extruder, Controlling Hydration, and Rheology