Home
Modern Robotics, Chapter 13.5: Mobile Manipulation
Northwestern Robotics
16 มี.ค. 2018
การดู 6,259 ครั้ง
Modern Robotics, Chapter 8.1: Lagrangian Formulation of Dynamics (Part 1 of 2)
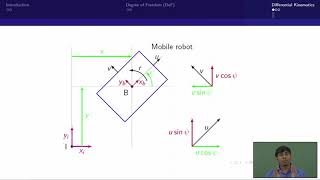
mod01lec03 - Introduction to Mobile Robot Kinematics
Modern Robotics, Chapter 13.4: Odometry
Modern Robotics, Chapter 13.3.1: Modeling of Nonholonomic Wheeled Mobile Robots
Vintage Spring Paintings Art For Your TV | Vintage Art Slideshow For Your TV | TV Art | 4K | 3.5Hrs
Mobile Manipulator combines a cobot arm with an autonomous mobile robot for flexible production
Robotics | Part 5 | Direct and Inverse Kinematics of 2 dof and 3 dof
Modern Robotics, Chapter 7: Kinematics of Closed Chains
Modern Robotics, Chapter 2.1: Degrees of Freedom of a Rigid Body
Europe's Megaproject to Replace Russian Railways
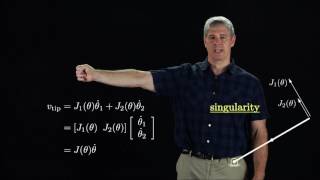
Modern Robotics, Chapter 5.3: Singularities
Modern Robotics, Chapter 2.3.2: Configuration Space Representation
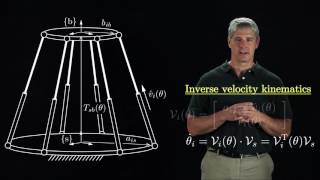
Modern Robotics, Chapter 13.2: Omnidirectional Wheeled Mobile Robots (Part 1 of 2)
Robot Dynamics, Part 2: Lagrangian Formulation
SolidWorks RE Tutorial # 335: Beginner Tractor complete video
Modern Robotics, Chapter 10.6: Virtual Potential Fields
Modern Robotics, Chapter 5: Velocity Kinematics and Statics
How SpaceX Will Build The First Moon Base