Home
Trajectory and Foothold Optimization using Low-Dimensional Models for Rough Terrain Locomotion 2017
Dynamic Legged Systems lab
27 ก.พ. 2017
การดู 919 ครั้ง
Impedance Control for Soft Robots
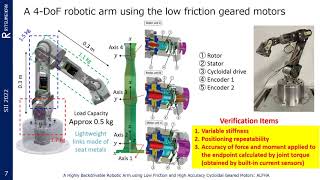
SII 2022 presentation: A Robotic Arm using Low Friction and High Accuracy Cycloidal Geared Motors
เรื่องเล่า Boeing
หลุมดำ คืออะไร? | Black Hole
Mars - Life on the Red Planet? | DW Documentary
Fast Object Visual Servoing and Grasping on Quadruped Manipulator [IROS 2023]
Mood Lights with gradient colors 2023 | 3 Hour Screensaver | 4K Gamma
Vintage Spring Paintings Art For Your TV | Vintage Art Slideshow For Your TV | TV Art | 4K | 3.5Hrs
Visually Guided Robot with Arm mounted Camera Picks Boxes from a Conveyor Visual Robotics
How Red Bull Made a Drone Faster Than Formula 1
Line Walking and Balancing for Legged Robots with Point Feet
LORIS: A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
Quadrupedal Footstep Planning using Learned Motion Models of a Black-Box Controller (IROS 23)
IROS 2023 - Decentralised Multi-Robot Exploration using Monte Carlo Tree Search
An Efficient Paradigm For Feasibility Guarantees For Legged Robots (T-RO 23)
VJ LOOP NEON Colorful Changing Abstract Background Video Simple Lines Pattern Motion 4k Screensaver
ไฟฟ้าเบื้องต้น EP1/3(ไฟฟ้าคืออะไร ? ไฟฟ้าทำงานอย่างไร?)
VJ LOOP NEON Colorful Tunnel Compilation Abstract Background Video Lines Pattern 4k Screensaver
Vintage Summer Landscapes Art For Your TV | Vintage Art Slideshow For Your TV | TV Art | 4K | 3.5Hrs
Houdini Algorithmic Live #107 - Sci-Fi Dissolve





![Fast Object Visual Servoing and Grasping on Quadruped Manipulator [IROS 2023]](https://i.ytimg.com/vi/ztMl52v3ncY/mqdefault.jpg)