Home
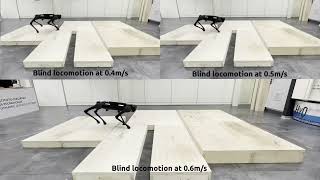
Onboard Perception-Based Trotting and Crawling with the Hydraulic Quadruped Robot (HyQ) (IROS'13)
Dynamic Legged Systems lab
12 เม.ย. 2017
การดู 1,143 ครั้ง
Fast Object Visual Servoing and Grasping on Quadruped Manipulator [IROS 2023]
Line Walking and Balancing for Legged Robots with Point Feet
LORIS: A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
Boston Dynamics NEW HUMANOID ROBOT SHOCKS The ENTIRE INDUSTRY! (New BOSTON Dynamics ATLAS)
Quadrupedal Footstep Planning using Learned Motion Models of a Black-Box Controller (IROS 23)
Real Time and High Precision demos at Global industrie 2024
Boston Dynamics NEW Humanoid Robot SHOCKS The ENTIRE Industry! (Atlas 2.0)
What Is The Biggest Thing In The Universe?
ViTAL: Vision-Based Terrain-Aware Locomotion for Legged Robots (T-RO 23)
A simple yet effective whole-body locomotion framework for quadruped robots
Ada Lovelace’s troubled Homework | Trailblazer
What's Really Happening At CERN
What are virtual particles?
Model Predictive Control with Environment Adaptation for Legged Locomotion
Optimization-Based Reference Generator for Nonlinear Model Predictive Control of Legged Robots
Optimal Motion Planning under Dynamic Risk Region for Safe Human-Robot Cooperatio
Surprise! Dormant Black Hole Found "Near" the Solar System and It's Huge!
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
SafeSteps: Learning Safer Footstep Planning Policies for Legged Robots via Model-Based Priors
LORIS: A Lightweight Free-Climbing Robot for Extreme Terrain Exploration - Presentation

![Fast Object Visual Servoing and Grasping on Quadruped Manipulator [IROS 2023]](https://i.ytimg.com/vi/ztMl52v3ncY/mqdefault.jpg)