Home
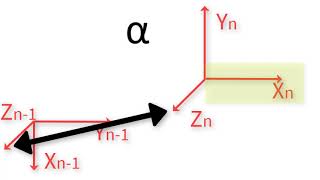
Denavit–Hartenberg parameters of a 3-link manipulator with prismatic joint - Example
bioMechatronics Lab
Jan 31, 2023
18,013 views
SYSC 4206 (Surgical Robotics) - Lecture 6: Inverse kinematics 1
Robotics 1 U1 (Kinematics) S5 (HTM) P2 (HTM by Denavit Hartenberg)
6 Axis Robot Forward & Inverse Kinematics Tutorial - Denavit Hartenberg Parameters With the AR4-MK2
Robotics 2 U1 (Kinematics) S2 (Denavit-Hartenberg) P3 (Parameter Table)
Denavit - Hartenberg (DH) Tables For Robotic Systems - Direct Kinematics II
1 1 5 Lecture Video 1 of 1 Homogeneous Transformation Matrix Example and Coordinate Transformation
Lecture 3 | Introduction to Robotics
2.10 Robotics || ESE Mains || D-H parameters of 3-R planar robot
Frame Assignment For Robotic Manipulators - Direct Kinematics I
Spacial Descriptions and Transformations - Worked Example
Robotics 2 U1 (Kinematics) S2 (Denavit-Hartenberg) P2 (Frames)
Robotics 2 U1 (Kinematics) S5 (Inverse Kinematics) P2 (Procedure and Programming)
Worked Example - Frame Assignment | DH Tables | Transformation Matrices (Direct Kinematics IV)
Lecture 2 | Introduction to Robotics
SYSC 4206 Lecture 7: Inverse kinematics 2, 6DOF robot arm with spherical wrist
Intro2Robotics Lecture 7b: Forward to Inverse Kinematics example
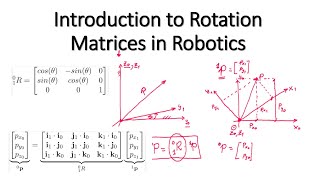
Introduction to Rotation Matrices in Robotics
พื้นฐานวิทยาการหุ่นยนต์ : การสร้างตาราง DH พารามิเตอร์
Analytical Inverse Kinematics of 6DOF Denso Arm
Introduction to DH Convention