Home
VoxelNet: End-to-End Learning for Point Cloud Based 3D Object (PAPER EXPLAINED)
Minimal Debug
12 ก.ย. 2021
การดู 7,521 ครั้ง
Philipp Krähenbühl - Point-based object detection
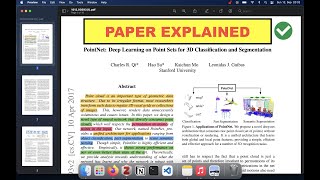
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation (PAPER EXPLAINED)
A comprehensive survey of LIDAR-based 3D object detection methods with DL for autonomous driving
VoxelNet End to End Learning for Point Cloud Based 3D Object Detection
[SGP-2022] Deep Learning on Point Clouds
How YOLO Object Detection Works
Point Density-Aware Voxels for LiDAR 3D Object Detection
Current Approaches and Future Directions for Point Cloud Object Detection in Intelligent Agents
What are Voxels? - Speedy Houdini
Labeling Lidar Point Clouds for Object Detection
将门创投 | 斯坦福大学在读博士生祁芮中台:点云上的深度学习及其在三维场景理解中的应用
3D Deep Learning Tutorial
เมื่อ Infinity เขย่าวงการคณิตศาสตร์ | Gödel's Incompleteness Theorems
Tech CEO: แชร์วิธีการทำงานของ AI
How To Visualize LiDAR Point Cloud In Python | KITTI Dataset
PointNet (CVPR 2017) 논문 리뷰
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
[DS Interface] VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection
PointNet | Lecture 43 (Part 1) | Applied Deep Learning
การสร้างแผนที่ 3D สวยๆ ง่ายๆ แค่ลากวาง



![[SGP-2022] Deep Learning on Point Clouds](https://i.ytimg.com/vi/gm_oW0bdzHs/mqdefault.jpg)










![[DS Interface] VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection](https://i.ytimg.com/vi/b10lygb1yZI/mqdefault.jpg)

