Home
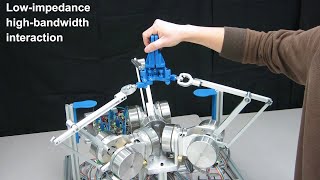
Backdrivable Kinematically Redundant (6+3)-DOF Hybrid Parallel Robot – Part 1: Trajectory Control
Laboratoire de robotique de l'université Laval / Laval University Robotics Laboratory
8 ก.ย. 2020
การดู 173,952 ครั้ง
Backdrivable Kinematically Redundant (6+3)-DOF Hybrid Parallel Robot –Part 2:Human–Robot Interaction
A backdrivable 6-dof parallel robot for sensorless dynamically interactive tasks
T-Flex: Compliant Flexure-based Large Range Precision Hexapod
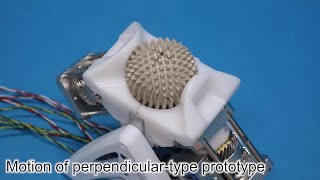
【Full HD】ABENICS: Active Ball Joint Mechanism With Three-DoF Based on Spherical Gear Meshings
Design of a Serial-Parallel Hybrid Leg for a Humanoid Robot
Update on the Spherical Parallel Manipulator
RepRap Monorail (Single Rail Tripteron)
The PaCoMe Adaptive Mechanical Fingers
Now it works! Spherical Parallel Joint (stepper motors, 3DoF)
The Cubli: a cube that can jump up, balance, and 'walk'
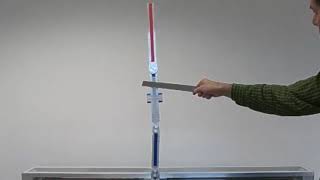
Swing-up and Control of Linear Triple Inverted Pendulum
6dof Motion Simulator demonstration
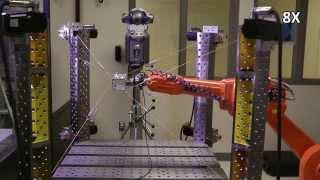
Calibration of an industrial robot using a cable robot and a laser tracker
ABENICS Active Ball Joint Mechanism with three DoF based on spherical gear meshings
5-DOFs Cartesian Parallel Robot
What are the singularities of a typical collaborative robot (cobot)
Ball and Plate PID control with 6 DOF Stewart platform
Backdrivable Parallel SCARA robot for pHRI including built-in gripper with unlimited rotation
Cable-driven parallel robots – Motion simulation i
Delta Robot Using Kinematics