Home
Agile and Perceptive Locomotion in Legged Robots (IROS'23 Workshop)
Robot Motor Intelligence (RoMI) Lab
Oct 8, 2023
1,416 views
Unlocking Agile and Object-Aware Loco-Manipulation (ICRA'24 ATOMPC Workshop)
MIT Robotics - Marco Hutter - Robots in the wild
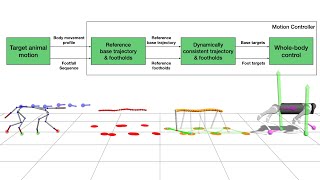
Animal Motions on Legged Robots Using Nonlinear Model Predictive Control - IROS 2022 Presentation
Think Fast, Talk Smart: Communication Techniques
IROS 35th Anniversary Forum Plenary 2: Marc Raibert -- A Culture of Robotics Research
Increasing the reliability of legged robots in the presence of uncertainty
Perceptive Locomotion through Nonlinear Model Predictive Control
Shocking SECRET Behind OpenAI o1 Model - Bans Anyone Who Dares Ask THIS!
Best Robot Arms of our time
Controlling Contact Transitions for Dynamic Robots (Will Yang thesis defense)
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric Whole-body Controllers
Time-Optimal Online Replanning for Agile Quadrotor Flight (RAL-IROS 2022 talk)
Crocoddyl: An Efficient and Versatile Framework for Multi-Contact Optimal Control (ICRA'20)
CSL seminar: Byron Boots - Machine Learning and MPC for Adaptive Robotic Systems
Turing Lecture: Building dynamic robots - Marc Raibert, Boston Dynamics
Inverse-Dynamics MPC via Nullspace Resolution
How Robots Use Maths to Move
Lecture 3 | Introduction to Robotics
Predictive Control with Indirect Adaptive Laws for Quadrupedal Robots
[01] W. Merkel, 6th Workshop on Legged Robots ICRA'22



















![[01] W. Merkel, 6th Workshop on Legged Robots ICRA'22](https://i.ytimg.com/vi/fWvMfS-psyA/mqdefault.jpg)