Home
Hierarchical Optimization-Based Control for Agile and Adaptive Legged Robots
Control Seminar
Nov 15, 2023
937 views
Energy maximizing control of wave energy systems – the COER way!
Hierarchical Optimization-Based Control for Agile and Adaptive Legged Robots
Controlling Contact Transitions for Dynamic Robots (Will Yang thesis defense)
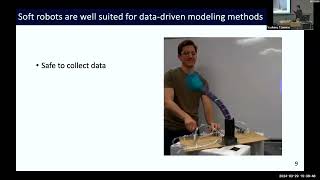
Leveraging Data and the Koopman Operator to Make Soft Robots More Capable
Physics-Guided Data-Driven Modeling for Control in Additive Manufacturing
Theoretical Foundation of Learning-based Planning for Linear Temporal Logic Objectives
Everything You Need to Know About Control Theory
Research problems of my life: Overview and advice for the inspired
Meet Wendy Wood, Author of Good Habits, Bad Habits
Surprising smoothness in common multi-contact collisions (Intro not recorded)
What are Transformer Models and how do they work?
Engineering Interns on their first day be like...
Are CMDPs Fundamentally Harder than MDPs?
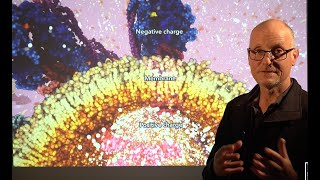
Molecular animation – Tech Talk by Drew Berry wehi.tv (2022)
Predictive Control with Indirect Adaptive Laws for Quadrupedal Robots
How 3 Phase Power works: why 3 phases?
A Day in My Life at USC | University of Southern California
What Are Quantum Materials?
What we see and what we value: AI with a human perspective—Fei-Fei Li (Stanford University)
Direct Air Capture Summit 2021 kick-off