Home
SFRE: Safe and Fast Robotic Exploration for 3D Uneven Terrains
NKU-RaHAIC
8 พ.ค. 2024
การดู 127 ครั้ง
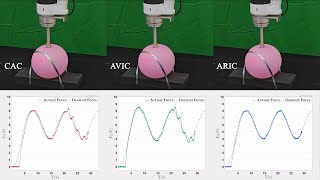
Adaptive Robust Interaction Force Control of a Robotic Manipulator in Uncertain Environments
LRAE: Large-Region-Aware Safe and Fast Autonomous Exploration of Ground Robots for Uneven Terrains
การสร้างแผนที่ 3D สวยๆ ง่ายๆ แค่ลากวาง
Centralized Task Offloading on Distributed Remote Robot Agent(s) - SLAM
Learning Semantic Traversability with Egocentric Video and Automated Annotation Strategy
แบไต๋บุก! ดูโรงงานผลิตแอร์ปีละ 3 ล้านเครื่อง ทำยังไง? กับเทคโนโลยี 5G ออกแบบโดย HUAWEI
Mood Booster 🌻Best Songs You Will Feel Happy and Positive After Listening To It (Immediate Effect)
G2VD Planner: Efficient Motion Planning With Grid-based Generalized Voronoi Diagrams
CURE: A Hierarchical Framework for Multi-Robot Autonomous Exploration (Revision)
STVO: Spatial-Temporal Constrained Velocity Obstacle for Safe Navigation among Pedestrians
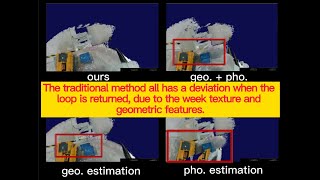
High-Accuracy Pose Estimation for 3D Reconstruction Considering the Manipulator Motion Constraints
BA-LIOM: Tightly-coupled Laser-Inertial Odometry and Mapping with Bundle Adjustment
PolarPoint-BEV
On-the-Go Tree Detection and Geometric Traits Estimation with Ground Mobile Robots in Tree Groves
Revised video link: https://youtu.be/P5jXKlGQOec
IR-VIO: Illumination-Robust Visual-Inertial Odometry Based on Adaptive Weighting Algorithm
อย่างเดือด!! สอนใช้ Blender ให้เป็นใน 1 ชั่วโมง (สำหรับมือใหม่)
Bayes' Rays: Uncertainty Quantification for Neural Radiance Fields
TC2LI-SLAM: A Tightly Coupled Camera-LiDAR-Inertial SLAM System
สอนพื้นฐาน Excel ตั้งแต่เริ่มต้น แบบครบจบในคลิปเดียว!!