Home
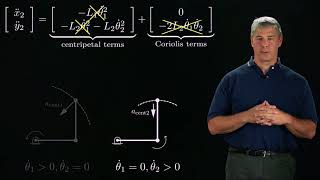
Modern Robotics, Chapter 8.1: Lagrangian Formulation of Dynamics (Part 1 of 2)
Northwestern Robotics
25 ต.ค. 2017
การดู 134,914 ครั้ง
Modern Robotics, Chapter 8.1: Lagrangian Formulation of Dynamics (Part 2 of 2)
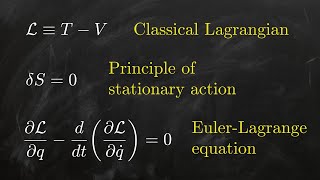
Introduction to Lagrangian Mechanics
Inverse Kinematics of Robots | Robotics 101
Rotating Frames of Reference
Lagrangian and Hamiltonian Mechanics in Under 20 Minutes: Physics Mini Lesson
China has Unveiled The World's FASTEST Robot That BROKE All Speed Records
Why Lagrangian Mechanics is BETTER than Newtonian Mechanics F=ma | Euler-Lagrange Equation | Parth G
Lagrangian Mechanics I: Introducing the fundamentals
Two Link Robot Dynamics
Euler-Lagrange equation explained intuitively - Lagrangian Mechanics
2 2 1 Lecture Video 1 of 6 Jacobian Matrix Explanation
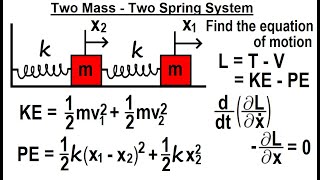
Physics 68 Lagrangian Mechanics (18 of 32) Two Mass - Two Spring System
The War Against Entropy
USA vs China Fighter Jets | Balance Of Power | Insider
Physics without Forces | Lagrangian Mechanics #SoME2
Modern Robotics, Chapter 13.3.1: Modeling of Nonholonomic Wheeled Mobile Robots
Physics 68 Lagrangian Mechanics (8 of 25) Example: The Atwood Machine
4 DOF Manipulator Lagrange Dynamics Derivation Using MATLAB Toolbox
ชาวต่างชาติกับการพัฒนาเมืองเซี่ยงไฮ้ (Part 2/3) | 8 Minute History EP.212