Home
Simulasi Kendali PID, LQR dan LQG pada Segway
Fahmizal
31 ก.ค. 2021
การดู 350 ครั้ง
Pemodelan dan Simulasi Quadcopter menggunakan Kendali LQR
self balancing robot | Simulink basics series
Pengujian Kendali PID untuk Kestabilan Sudut Roll pada TRMS
Controlador PID, LQR y LQG Segway
How To Make Remote Control LED 3.7 to 12v | Using 555ic 💯 Working
Pengujian Kestabilan Terbang pada Attitude UAV Bicopter menggunakan Test Bed dengan Dynamics Noise
KENDALI KESEIMBANGAN SEGWAY DENGAN METODE LINEAR QUADRATIC GAUSSIAN (LQG)
Penerapan SLAM dengan ROS menggunakan Webots
Remake Feedback Educational Servo ES 151 menggunakan Arduino Mega 2560
LQG Controller design in Matlab Simulink
Tutorial Import Model 3D CAD Robot Wall Follower pada Software Simulator Webots
Pengujian Simulasi Kendali LQR vs LQG pada TRMS [Twin Rotor MIMO System]
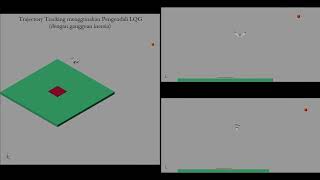
Trajectory Tracking menggunakan Pengendali LQR vs LQG pada UAV Bicopter
Object Recognition Robot SAR with Webots Simulation
Simulasi Self Balancing Robot with Webots and Vrep
How To Build/Rebuild a Hoverboard/Balance Scooter!
MOUNTAINS ARCHVIZ | 3Ds Max + FStorm Architectural Visualization Tutorial
How To Make Amazing and Very Useful Project | Using IRFZ44
Obstacle Avoidance Using Braitenberg Algorithm with Webots Festo Robotino 3










![Pengujian Simulasi Kendali LQR vs LQG pada TRMS [Twin Rotor MIMO System]](https://i.ytimg.com/vi/l5HXZpWjMwE/mqdefault.jpg)