Home
Bipedal Locomotion with Nonlinear Model Predictive Control
Manuel Yves Galliker
14 มี.ค. 2022
การดู 2,668 ครั้ง
Gerardo Bledt (MIT): Generalizing and improving regularized predictive control for legged robots
CDC 2021 Presentation - Force-and-moment-based MPC for Highly Dynamic Bipedal Robots
MIT Robotics - Jessy Grizzle - Mathematics and Learning for Bipedal Locomotion
All New Atlas | Boston Dynamics
สปอยดาบพิฆาตกลางหิมะ2Ep355:ศึกแตกหักเทพสัปประยุทธ
ใบดำ • คุณโก้ ปราณบุรี | 20 เม.ย. 67 | THE GHOST RADIO
Perturbation-Resilient Bipedal Locomotion via Signal Temporal Logic Guided Model Predictive Control
Learning-based Model Predictive Control for Autonomous Racing
Why Don’t We Have Better Robots Yet? | Ken Goldberg | TED
Introducing HyperLeg: Human-like Robot Leg and Foot for Highly Dynamic Motions
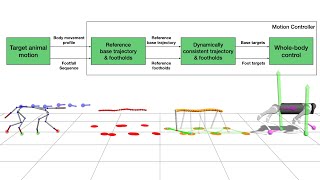
Animal Motions on Legged Robots Using Nonlinear Model Predictive Control - IROS 2022 Presentation
Perceptive Locomotion through Nonlinear Model Predictive Control
MIT Robotics - Marco Hutter - Robots in the wild
Legged Robots - Computerphile
Turing Lecture: Building dynamic robots - Marc Raibert, Boston Dynamics
Building a HIGH SPEED Rocket Plane
คำทักทายภาษาญี่ปุ่น เรียนภาษาญี่ปุ่นพื้นฐาน
Lecture 4 | Introduction to Robotics
Offline motion libraries and online MPC for advanced mobility skills
ROBOTICS STUDIO: Taking a leap into building a bipedal robot