Home
Modern Robotics, Chapter 5: Velocity Kinematics and Statics
Northwestern Robotics
27 ส.ค. 2017
การดู 42,715 ครั้ง
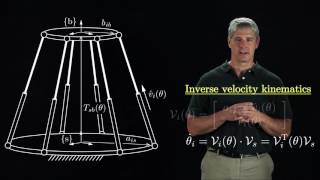
Modern Robotics, Chapter 5.1.1: Space Jacobian
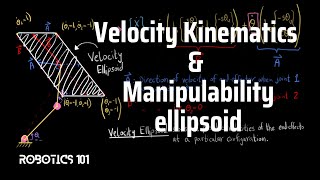
Velocity Kinematics & Manipulability Ellipsoids | Robotics 101
Modern Robotics, Chapter 7: Kinematics of Closed Chains
What are robot singularities?
Rotational Motion
Modern Robotics, Chapter 4.1.1: Product of Exponentials Formula in the Space Frame
Inverse Kinematics of Robots | Robotics 101
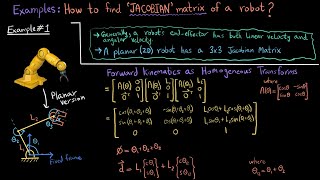
How to find Jacobian Matrix? | Solved Examples | Robotics 101
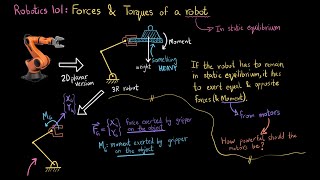
Forces & Torques of a robot | Robotics 101
Lecture 19 - Introduction to differential kinematics
Modern Robotics, Chapter 6.2: Numerical Inverse Kinematics (Part 1 of 2)
Lecture 11: Robots Kinematics
Modern Robotics, Chapter 5.4: Manipulability
What is Jacobian? | The right way of thinking derivatives and integrals
Something Strange Happens When You Follow Einstein's Math
Lecture 2 | Introduction to Robotics
Modern Robotics, Chapter 6: Inverse Kinematics of Open Chains
Singularity - What it is and how to avoid it!
Jacobian Matrix and Singularity