Home
HybVIO: Pushing the limits of real-time visual-inertial odometry
Spectacular AI
24 พ.ย. 2021
การดู 6,044 ครั้ง
Robust, Visual-Inertial State Estimation: from Frame-based to Event-based Cameras
Visual-Inertial Navigation Systems: An Introduction
Visual SLAM in the era of Deep Learning | AI Talks
เทคนิคการ Prompt และการใช้งาน CHAT GPT
Deep Visual SLAM Frontends: SuperPoint, SuperGlue, and SuperMaps (#CVPR2020 Invited Talk)
ดนตรีบำบัดหัวใจและหลอดเลือด 🌿 ทำให้ระบบประสาทสงบและทำให้จิตใจสงบ ดนตรีอ่อนโยน #36
Vintage Spring Paintings Art For Your TV | Vintage Art Slideshow For Your TV | TV Art | 4K | 3.5Hrs
Cozy Sunrise ☀️ Lofi Keep You Safe ♨️ Lofi Hip Hop ~ Lofi Meditication / lofi study - relax - sleep
Real-time mapping with OAK-D and RealSense
Autonomous aerial navigation using monocular visual-inertial fusion
Open-source SLAM with Intel RealSense depth cameras
A Benchmark Comparison of Monocular Visual-Inertial Odometry Algorithms for Flying Robots
ดนตรีรักษาหัวใจและหลอดเลือด🌿 เพลงผ่อนคลาย ฟื้นฟูระบบประสาท ผ่อนคลาย #41
Visual Odometry with Monocular Camera For Beginners: A Project in OpenCV
Vintage Summer Landscapes Art For Your TV | Vintage Art Slideshow For Your TV | TV Art | 4K | 3.5Hrs
EKF-SLAM (Cyrill Stachniss)
L16 Introduction to Visual SLAM
ROVIO: Robust Visual Inertial Odometry
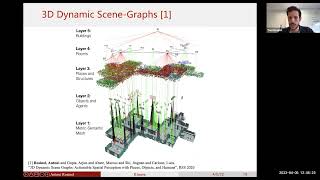
Guest Lecture by Antoni Rosinol - Kimera: From Classical SLAM to 3D Spatial Perception