Home
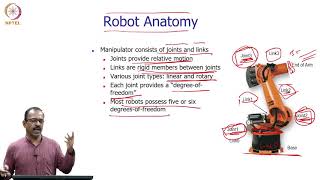
Lecture - 2.6 - DH Algorithm
NPTEL-NOC IITM
27 ก.ย. 2020
การดู 22,232 ครั้ง
Lecture - 2.7 - DH Algorithm
หุ่นยนต์หินกระดอน - ศาสตร์แห่งการขว้างหินที่สมบูรณ์แบบ
Lecture 9 - DH parameters
Animation vs. Physics
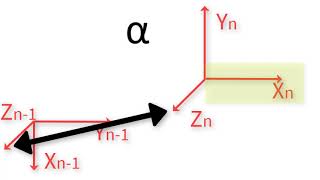
Lecture - 2.5 - Kinematic Parameters
Robotics 2 U1 (Kinematics) S3 (Jacobian Matrix) P2 (Finding the Jacobian)
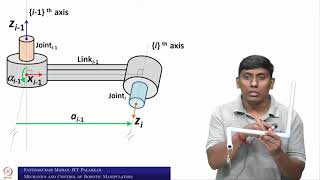
Lecture 8 - Kinematic parameters
Secret Key Exchange (Diffie-Hellman) - Computerphile
Lecture - 2.8 - Forward Kinematics
How to Make a Robot out of Cardboard (Very Simple )
Intro2Robotics Lecture 7b: Forward to Inverse Kinematics example
Robotics 2 U1 (Kinematics) S2 (Denavit-Hartenberg) P3 (Parameter Table)
“ธาตุและตารางธาตุ” เคมี รู้กัน วันเดียว - เคมีม.4 เทอม 1 | เคมีพี่กัปตัน
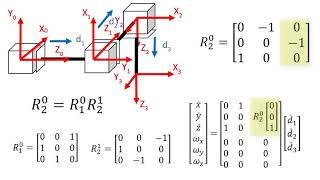
Lecture - 2 .1 - Kinematics- Coordinate transformations
Robotics 1 U1 (Kinematics) S5 (HTM) P2 (HTM by Denavit Hartenberg)
Lecture 1.1 - Introduction
⚡️แม่เหล็กและไฟฟ้า 2 : แรงแม่เหล็ก [Physics#68]
Lecture - 2.3 - Industrial Robot- Kinematic Structures
Intro2Robotics Lecture 5a: Forward kinematics: Denavit-Hartenberg convention
Lecture - 1.2 - Evolution of Robotics












![⚡️แม่เหล็กและไฟฟ้า 2 : แรงแม่เหล็ก [Physics#68]](https://i.ytimg.com/vi/SzGD9hQUQE8/mqdefault.jpg)