Home
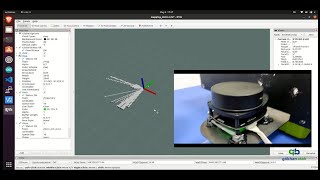
ROS Autonomous Navigation and Obstacle Avoidance with Lidar, SLAM gmapping
Anh Kỹ Sư
19 มี.ค. 2024
การดู 322 ครั้ง
Easy SLAM with ROS using slam_toolbox
RPLidar ROS Hector SLAM
Visual SLAM of Robot Vacuum Cleaner (Samsung Hauzen RE70V)
#2. Robot Operating System - Hướng dẫn Linux cơ bản và node, topic trong ROS Neotic
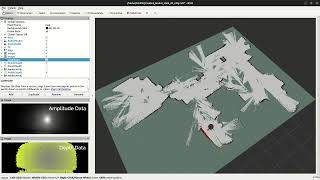
2D SLAM with 3D Depth and Amplitude Data by CygLiDAR D2
Gas Source Localization in Complex Unknown Indoor Environment Using a Hierarchical Planner
Understanding the Particle Filter | | Autonomous Navigation, Part 2
autonomous bus
NeuronBot Avoids Dynamic Obstacle Immediately with ROS 2 Navigation
ROS Robot - Object avoidance with SLAM gmapping and AMCL
ROS Lidar sensor and its properties
자이카 자율주행 - 카토그래퍼 Cartographer SLAM 주행
Building a ROS Robot for Mapping and Navigation #2
Monocular SLAM with ORB-SLAM3 and Raspberry Pi Camera Module V2
#5. Robot Operating System - Hướng dẫn lập trình tự động điều hướng- Phần 1
Run Without Traffic Signs ĐATN - Quoc Thang & Dai Hiep - DHBK HCM (8/5/2024)
ROS Autonomous Navigation - Linorobot 4WD
Create URDF File and Model of Four-Wheeled Mobile Robot in ROS - ROS Robotics Tutorial
How to makes a robot car drive straight and turn exact right angles with MPU6050 gyroscope sensor
Autonomous navigation & mapping with ROSbot XL