Home
Efficient Path Planning and Collision Avoidance for Robotic Arms
Robotics Innovations Lab @ IISc Bangalore (RIL)
31 ส.ค. 2020
การดู 4,803 ครั้ง
Optimizing Robot Paths (by Coping with Robot Singularities)
Advanced Motion Planning: FMT*, Informed RRT*, BIT*, and RABIT* | An OMPL Tutorial with Examples
Collaborative Robotics: Dynamic Collision Avoidance
Modern Robotics, Chapter 10.6: Virtual Potential Fields
New European rockets! How do they compare? // Inside RFA & ISAR's Factories!
รวมเพลงชิว ฟังต่อเนื่อง Acoustic Love Songs [G : Music Playlist]
Introduction to Motion Planning Algorithms | Motion Planning with the RRT Algorithm, Part 1
CPC: Complementary Progress Constraints for Time-Optimal Quadrotor Trajectories
Coding Challenge #64.2: Inverse Kinematics
Modeling a Vehicle Dynamics System Using MATLAB and Simulink - MathWorks and Axlr8r Formula Racing
Perturbation-Resilient Bipedal Locomotion via Signal Temporal Logic Guided Model Predictive Control
รวมเพลงชิวๆฟังต่อเนื่อง 2019 [G : Music Playlist ฟังเพลงต่อเนื่อง]
Robots: Axis and Orientation of Movement - Pitch, Roll, Yaw
Neutrinos and black holes | Even Bananas
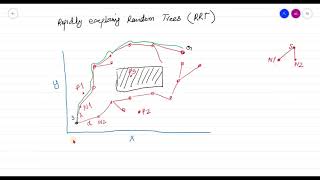
Lab 7: RRT and RRT* algorithm in Matlab
รวมเพลงเพราะ ฟังเพลินตอนอยู่คนเดียว [Longplay]
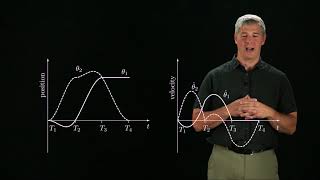
Modern Robotics, Chapter 9.3: Polynomial Via Point Trajectories
Lecture 18 - Inverse kinematic solution based on numerical methods using Matlab
#มนต์แคนแก่นคูน #ต่ายอรทัย #เพลงฮิต ฟังเพลงลูกทุกฮิต ยาวต่อเนื่อง ผาแดงของน้อง นางไอ่ของอ้าย
Intro2Robotics Lecture 14a: Manipulator Singularities




![รวมเพลงชิว ฟังต่อเนื่อง Acoustic Love Songs [G : Music Playlist]](https://i.ytimg.com/vi/DmpLt8-Zuok/mqdefault.jpg)




![รวมเพลงชิวๆฟังต่อเนื่อง 2019 [G : Music Playlist ฟังเพลงต่อเนื่อง]](https://i.ytimg.com/vi/uivgJFg0fYw/mqdefault.jpg)

![รวมเพลงเพราะ ฟังเพลินตอนอยู่คนเดียว [Longplay]](https://i.ytimg.com/vi/Sg0TnTGCeWs/mqdefault.jpg)