Home
Evolving Gaits for Legged Robots: Neural Networks with Geometric Patterns Perform Better
Evolving AI Lab
20 ต.ค. 2012
การดู 50,617 ครั้ง
แต่โครงข่ายประสาทเทียมคืออะไร? | บทที่ 1 การเรียนรู้เชิงลึก
Festo – BionicWheelBot (English/Deutsch)
How are memories stored in neural networks? | The Hopfield Network #SoME2
Computational Design of Mechanical Characters
Introducing Spot (previously SpotMini)
The Cubli: a cube that can jump up, balance, and 'walk'
Neuroevolution of Augmenting Topologies (NEAT)
Quadruped robot 4DOF
Neural Network from Scratch | Mathematics & Python Code
Hexapod Gait demo. Fast and slow..
Locomotion Skills for Simulated Quadrupeds
Orignal transformer paper "Attention is all you need" introduced by a layman | Shawn's ML Notes
Polarization of Light: circularly polarized, linearly polarized, unpolarized light.
Neural Networks Explained from Scratch using Python
Automated Deep Reinforcement Learning Environment for Hardware of a Modular Legged Robot
Illustrated Guide to LSTM's and GRU's: A step by step explanation
Neural Network Demo Animation
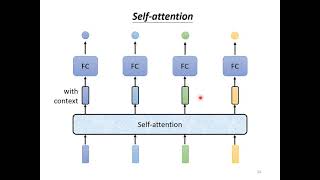
【機器學習2021】自注意力機制 (Self-attention) (上)
What Exactly Is Nanotechnology? Iron Man Nanotech, A New Frontier, Nanotechnology explained
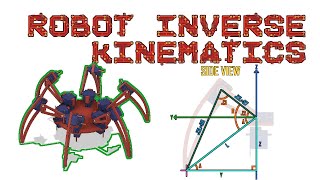
Robot Inverse Kinematics With A Hexapod Leg