Home
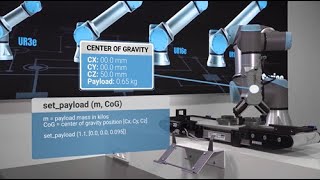
Tool Configuration: TCP, orientation, payload & center of gravity
Universal Robots Academy
16 ธ.ค. 2021
การดู 16,516 ครั้ง
UR Robot Explainer
How to use the force sensor to detect objects (direction command/move until tool contact)
CB3: How to change payload and center of gravity during program execution
Safety: create and configure safety planes
Sensopart VISOR® Robotic en UR Cap, voor een naadloze verbinding tussen Vision-sensor en robot.
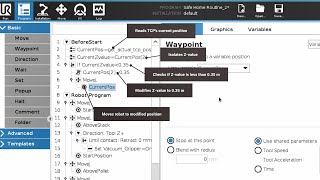
Prevent collision after program stop with a "Before Start Sequence"
YASKAWA Robotics - Imagefilm 2014 DE
How to align the active TCP to a feature
Robots optimize assembly and packaging by 30%
Improve and speed up your programming with constrained freedrive
Universal Robots Mini-Factory Application Showroom_Set 3_Full Video
CURSO DE UNIVERSAL ROBOTS POLYSCOPE Clase #2 Configuración de TCP
UR 5 Joint Replacement Tutorial
Programación de Universal Robots Serie E uso de Simulador
Lights-Out Machine Tending with ActiNav System Addresses Labor Issues For New England Union Company
Unboxing Video UR3 Universal Robots
Inside a Universal Robots Axis
UR10e and UR20 - Speed comparison with maximum payload.
AICA: 3 steps Smart Assembly (with interface)