Home
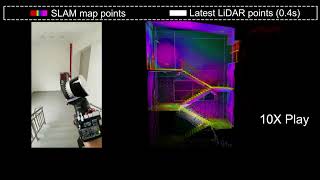
Tightly Coupled VIO with Robust Feature Association in Dynamic Illumination Environments
AISLab@USTC
10 มี.ค. 2024
การดู 164 ครั้ง
A Non-Conservative Uncertainty Bound of Gaussian Process for Motion Control in Robotics
HyperDog: An Open-Source Quadruped Robot Platform Based on ROS2 and micro-ROS
How This Pen Changed The World
αLiDAR: An Adaptive High-Resolution Panoramic LiDAR System
Continuous Jumping of RAMIEL Using Reinforcement Learning (Humanoids 2022)
Why Some Designs Are Impossible to Improve: Quintessence
Bizarre Form of Water Ice Solves a Magnetic Mystery on Neptune and Uranus
Why I Stopped Self-Hosting
Building the FASTEST SR-71 Blackbird Rocket Plane!
New Evidence Found for Planet 9 with Konstantin Batygin
Robust Recovery Motion Control for Quadrupedal Robots via Learned Terrain Imagination
Development of Walking Gait for SpotMicro | Spot Micro Walking Demo
Slip Detection and Recovery for Quadruped Robots via Hybrid Position/Force Control
The Next Evolution of Impact Proof Ionic Thrusters! (BTC Mark 3)
LLAMA 3 & GROQ: Build The Future of Instant-Response Chatbots
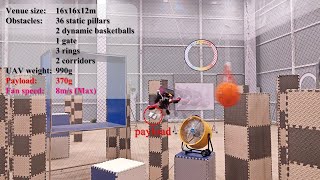
PE-Planner: A Performance-Enhanced Quadrotor Motion Planner for Autonomous Flight
1111Hz เชื่อมต่อกับจักรวาล - รับคู่มือจากจักรวาล - ดึงดูดพลังเวทย์มนตร์และการรักษา #2
Colonizing White Dwarfs
10 Winning Factors Chinese startups will lead the AI space in the future
A nice Math Olympiad Diophantine Algebra Equation Simplification | #diophantine #olympiad