Home
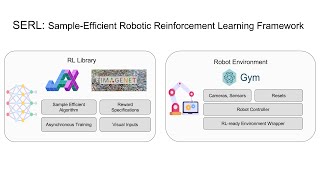
SERL: A Software Suite for Sample-Efficient Robotic Reinforcement Learning
3 เดือนที่ผ่านมา
3:37
FMB: a Functional Manipulation Benchmark for Generalizable Robotic Learning
3 เดือนที่ผ่านมา
2:48
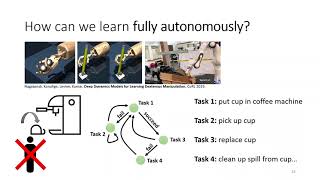
Making Real-World Reinforcement Learning Practical
4 เดือนที่ผ่านมา
38:23
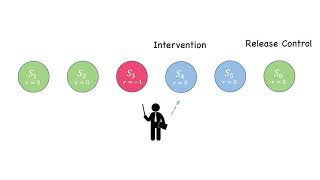
RLIF: Interactive Imitation Learning as Reinforcement Learning
4 เดือนที่ผ่านมา
3:03
CS 285: Guest Lecture: Dorsa Sadigh
5 เดือนที่ผ่านมา
1:01:41
CS 285: Guest Lecture: Aviral Kumar
5 เดือนที่ผ่านมา
56:18
CS 285: Lecture 23, Part 2: Challenges & Open Problems
5 เดือนที่ผ่านมา
38:01
CS 285: Lecture 23, Part 1: Challenges & Open Problems
5 เดือนที่ผ่านมา
28:25
Large-Scale Data-Driven Robotic Learning
5 เดือนที่ผ่านมา
31:30
CS 285: Lecture 21, RL with Sequence Models & Language Models, Part 3
5 เดือนที่ผ่านมา
16:59
CS 285: Lecture 21, RL with Sequence Models & Language Models, Part 2
5 เดือนที่ผ่านมา
23:40
CS 285: Lecture 21, RL with Sequence Models & Language Models, Part 1
5 เดือนที่ผ่านมา
29:54
CS 285: Andrea Zanette: Towards a Statistical Foundation for Reinforcement Learning
5 เดือนที่ผ่านมา
1:00:15
CS 285: Eric Mitchell: Reinforcement Learning from Human Feedback: Algorithms & Applications
5 เดือนที่ผ่านมา
54:29
Reinforcement Learning with Large Datasets: Robotics, Image Generation, and LLMs
6 เดือนที่ผ่านมา
1:06:05
CS 285: Lecture 18, Variational Inference, Part 4
6 เดือนที่ผ่านมา
25:29
Navigation with Large Language Models: Semantic Guesswork as a Heuristic for Planning (Summary)
6 เดือนที่ผ่านมา
4:27
NoMaD: Goal Masked Diffusion Policies for Navigation and Exploration (Summary Video)
6 เดือนที่ผ่านมา
3:09
CS 285: Lecture 2, Imitation Learning. Part 3
8 เดือนที่ผ่านมา
32:23
CS 285: Lecture 2, Imitation Learning. Part 1
8 เดือนที่ผ่านมา
24:48
CS 285: Lecture 2, Imitation Learning. Part 5
8 เดือนที่ผ่านมา
8:52
CS 285: Lecture 2, Imitation Learning. Part 2
8 เดือนที่ผ่านมา
23:06
CS 285: Lecture 2, Imitation Learning. Part 4
8 เดือนที่ผ่านมา
8:32
CS 285: Lecture 1, Introduction. Part 3
8 เดือนที่ผ่านมา
29:02
CS 285: Lecture 1, Introduction. Part 1
8 เดือนที่ผ่านมา
10:10
CS 285: Lecture 1, Introduction. Part 2
8 เดือนที่ผ่านมา
17:55
Multi-Stage Cable Routing Through Hierarchical Imitation Learning
9 เดือนที่ผ่านมา
5:04
Data-Driven Reinforcement Learning for Robotic Manipulation
9 เดือนที่ผ่านมา
24:52
Reinforcement Learning with Large Datasets: a Path to Resourceful Autonomous Agents
9 เดือนที่ผ่านมา
45:31
ViNT: A Foundation Model for Visual Navigation (Summary Video)
10 เดือนที่ผ่านมา
4:41