Home
Vertical hopper compositions for preflexive and feedback stabilized quadrupedal bounding, pacing, pr
4 ปีที่แล้ว
3:24
An Emergent Group Mind Across A Swarm of Robots Collective Cognition and Distributed Sensing via a S
4 ปีที่แล้ว
3:28
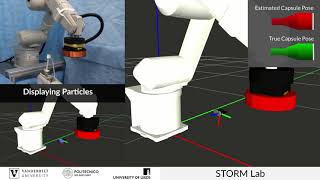
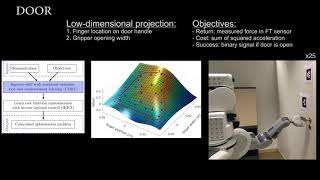
Part 1 Enhanced Real Time Pose Estimation for Closed Loop Robotic Manipulation of Magnetically
4 ปีที่แล้ว
0:32
Part 2 Enhanced Real Time Pose Estimation for Closed Loop Robotic Manipulation of Magnetically Actua
4 ปีที่แล้ว
2:21
Part 4 Enhanced Real Time Pose Estimation for Closed Loop Robotic Manipulation of Magnetically Actua
4 ปีที่แล้ว
1:31
Part 3 Enhanced Real Time Pose Estimation for Closed Loop Robotic Manipulation of Magnetically Actua
4 ปีที่แล้ว
2:23
Part 5 Enhanced Real Time Pose Estimation for Closed Loop Robotic Manipulation of Magnetically Actua
4 ปีที่แล้ว
1:37
Robotic Assistance in the Coordination of Patient Care part 1
4 ปีที่แล้ว
0:19
Robotic Assistance in the Coordination of Patient Care part 2
4 ปีที่แล้ว
8:21
Efficient Grounding of Abstract Spatial Concepts for Natural Language Interaction with Robot Platfor
4 ปีที่แล้ว
0:31
Feedback Synthesis For Underactuated Systems Using Sequential Second Order Needle Variations part 4
4 ปีที่แล้ว
0:17
Feedback Synthesis For Underactuated Systems Using Sequential Second Order Needle Variations part 1
4 ปีที่แล้ว
0:25
Feedback Synthesis For Underactuated Systems Using Sequential Second Order Needle Variations part 3
4 ปีที่แล้ว
2:01
Feedback Synthesis For Underactuated Systems Using Sequential Second Order Needle Variations part 2
4 ปีที่แล้ว
0:12
Animatronic Soft Robots by Additive Folding part 5
4 ปีที่แล้ว
0:56
Animatronic Soft Robots by Additive Folding part 4
4 ปีที่แล้ว
0:54
Animatronic Soft Robots by Additive Folding part 1
4 ปีที่แล้ว
1:06
Animatronic Soft Robots by Additive Folding part 2
4 ปีที่แล้ว
0:44
Animatronic Soft Robots by Additive Folding part 3
4 ปีที่แล้ว
0:57
A Reconfigurable Interactive Interface to Control Robotic Origami in Virtual Environments
4 ปีที่แล้ว
1:45
Learning Manipulation Skills from a Single Demonstration
4 ปีที่แล้ว
2:37
Probabilistic Cooperative Mobile Robot Area Coverage and its Application to Autonomous Seabed Mappin
4 ปีที่แล้ว
2:34
Simultaneous Task Allocation and Planning for Temporal Logic Goals in Heterogeneous Multi Robot Syst
4 ปีที่แล้ว
7:08
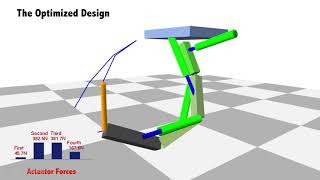
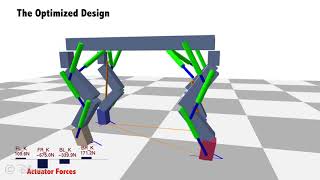
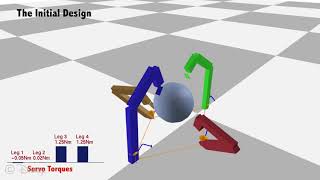
Computational Co Optimization of Design Parameters and Motion Trajectories for Robotic Systems 1
4 ปีที่แล้ว
1:17
Computational Co Optimization of Design Parameters and Motion Trajectories for Robotic Systems 3 IJR
4 ปีที่แล้ว
1:20
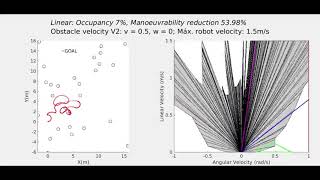
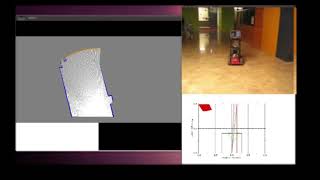
Model based robocentric planning and navigation for dynamic environments 1
4 ปีที่แล้ว
4:43
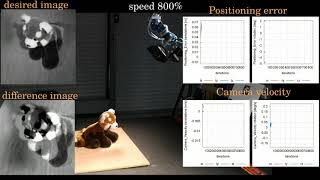
Wavelet and Shearlet based Image Representations for Visual Servoing 1
4 ปีที่แล้ว
0:55
Wavelet and Shearlet based Image Representations for Visual Servoing 4
4 ปีที่แล้ว
3:37
Model based robocentric planning and navigation for dynamic environments 2
4 ปีที่แล้ว
2:16
Computational Co Optimization of Design Parameters and Motion Trajectories for Robotic Systems 5 IJR
4 ปีที่แล้ว
1:19