Home
Graphs of Convex Sets with applications to optimal control and motion planning
10 วันที่ผ่านมา
1:07:35
Motion Planning around Obstacles with Convex Optimization
5 เดือนที่ผ่านมา
3:43
Fast Path Planning Through Large Collections of Safe Boxes
1 ปีที่แล้ว
1:03
Tao Pang's Ph.D. Thesis Defense (Jan 20, 2023)
1 ปีที่แล้ว
1:06:39
Scalable Verification of Robots and Recurrent Networks -- Shen Shen's Thesis Defense
3 ปีที่แล้ว
1:04:11
Self-Supervised Correspondence in Visuomotor Policy Learning
4 ปีที่แล้ว
5:00
Dense Visual Learning for Robot Manipulation
4 ปีที่แล้ว
1:10:32
A Supervised Approach to Predicting Noise in Depth Images
5 ปีที่แล้ว
2:16
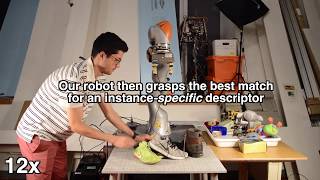
kPAM: KeyPoint Affordances for Category-Level Robotic Manipulation (extended technical version)
5 ปีที่แล้ว
3:16
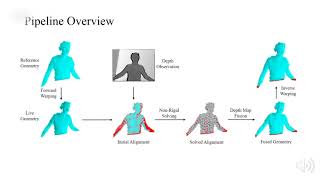
SurfelWarp: Efficient Non-Volumetric Single View Dynamic Reconstruction
5 ปีที่แล้ว
4:35
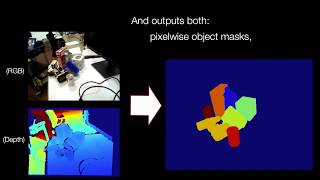
Dense Object Nets: Learning Dense Visual Object Descriptors By and For Robotic Manipulation
5 ปีที่แล้ว
4:22
LabelFusion: A Pipeline for Generating Ground Truth Labels for Real RGBD Data of Cluttered Scenes
6 ปีที่แล้ว
2:59
NanoMap: Fast, Uncertainty-Aware Proximity Queries with Lazy Search over Local 3D Data
6 ปีที่แล้ว
3:17
Global Inverse Kinematics via Mixed-Integer Convex Optimization
6 ปีที่แล้ว
13:54
Team MIT at the 2015 DARPA Robotics Challenge Finals
7 ปีที่แล้ว
17:44
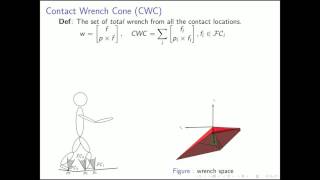
Planning robust walking motion on uneven terrain via convex optimization
7 ปีที่แล้ว
10:47
Tracking Objects with Point Clouds from Vision and Touch
7 ปีที่แล้ว
1:24
Funnel Libraries for Real-Time Robust Feedback Motion Planning (Anirudha Majumdar)
7 ปีที่แล้ว
54:17
Car Model Simulation
8 ปีที่แล้ว
0:22
Small Drone Dodging Obstacles at High Speed using Funnel Libraries
8 ปีที่แล้ว
1:59
High-Speed Autonomous Obstacle Avoidance with Pushbroom Stereo (Andy Barry)
8 ปีที่แล้ว
52:40
Pushbroom Stereo for High-Speed Obstacle Avoidance (technical video)
8 ปีที่แล้ว
3:00
Constrained robotic optimization and control
8 ปีที่แล้ว
0:54
Planning and Control for Quadrotor Flight through Cluttered Environments
8 ปีที่แล้ว
1:08
Feedback-motion-planning with simulation-based LQR-trees
8 ปีที่แล้ว
3:08
Exploiting the complementarity structure: stability analysis of contact dynamics via sums-of-squares
9 ปีที่แล้ว
40:56
Trajectory optimization of robots through contact
9 ปีที่แล้ว
0:56
Efficient Mixed-Integer Trajectory Planning for UAVs
9 ปีที่แล้ว
2:07
Pushbroom stereo for high-speed navigation in cluttered environments
9 ปีที่แล้ว
1:13
Propellor Hang with Wingeron Airplane
9 ปีที่แล้ว
1:42