Home
Enabling robots to see better through improved camera calibration
10 ปีที่แล้ว
1:24
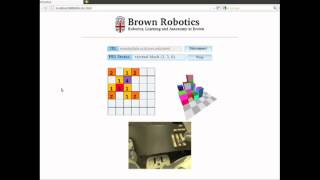
Web Robotics
10 ปีที่แล้ว
1:33
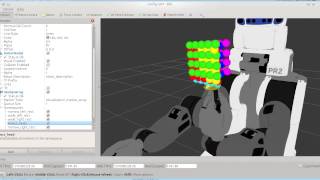
Improving robotic manipulation in changing or difficult environments
10 ปีที่แล้ว
1:29
Getting groovy with the Raspberry Pi
10 ปีที่แล้ว
1:15
Simplifying the process of mapping and modeling with low cost sensors using only depth information
10 ปีที่แล้ว
1:42
Modeling, controlling, and characterizing the Velo gripper prototype
10 ปีที่แล้ว
1:03
Advancements in connecting to ROS via the web with the ROSbridge suite
10 ปีที่แล้ว
1:34
Robot programming through demonstration: Building Ikea furniture
10 ปีที่แล้ว
1:56
Web-based Interactive Markers and realtime 3D point cloud streaming
10 ปีที่แล้ว
1:57
Improving Navigation Interactions
10 ปีที่แล้ว
1:25
Giving ears to PR2 with 8Sounds and ManyEars
11 ปีที่แล้ว
1:31
PR2 actuator diagnostic tool
11 ปีที่แล้ว
1:29
Object discovery with megaworld
11 ปีที่แล้ว
1:10
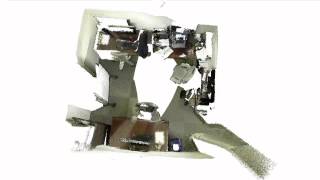
Real-time Modular 3D Mapping
11 ปีที่แล้ว
1:34
Object detection on a rotating platform
11 ปีที่แล้ว
2:12
Optimizing computer vision and new tools for perception research
11 ปีที่แล้ว
1:37
Advanced manipulation with Darrt planner
11 ปีที่แล้ว
1:17
Advanced manipulation with Darrt planner
11 ปีที่แล้ว
1:13
Simplifying Robot Teleoperation with Constraints
11 ปีที่แล้ว
1:27
Robots for Humanity (IROS 2012 Video Track)
11 ปีที่แล้ว
2:44
Improving Perception in PCL
11 ปีที่แล้ว
1:52
Exploring ROS with the TurtleCore
11 ปีที่แล้ว
1:37
ROS: Five Years
11 ปีที่แล้ว
2:47
Enabling end-users to program new skills on their robot
11 ปีที่แล้ว
1:46
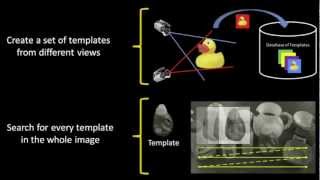
Deformable parts-based object recognition for Open CV
11 ปีที่แล้ว
2:28
Willow Garage Velo 2G Gripper
11 ปีที่แล้ว
3:12
Exporting URDFs Directly From Solidworks
11 ปีที่แล้ว
1:30
Advancements with the Flexible Collision Checking Library (FCL)
11 ปีที่แล้ว
2:34
Modeling and analyzing robotic grippers in software
11 ปีที่แล้ว
1:23
Rviz for android
11 ปีที่แล้ว
1:34