Home
Class 16 - Stereopsis
4 ปีที่แล้ว
28:40
Class 14 SfM II
4 ปีที่แล้ว
23:37
Class 15 - Optical Flow
4 ปีที่แล้ว
17:32
Class 13 - Structure from Motion I: Epipolar Geometry
4 ปีที่แล้ว
19:14
Class 12 - Projective Transformations
4 ปีที่แล้ว
22:21
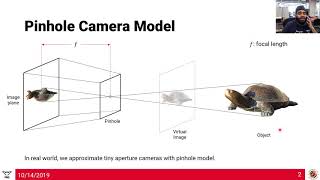
Class 11 - Camera Models
4 ปีที่แล้ว
21:37
Class 10 - Features in Computer Vision
4 ปีที่แล้ว
25:26
Class 9 - Fundamentals of Image Processing
4 ปีที่แล้ว
27:14
Class 7 - Quadrotor Controls
4 ปีที่แล้ว
51:57
Class 8 - Cameras, Image Formation, GMM
4 ปีที่แล้ว
25:58
Class 6 - Quadrotor Dynamics
4 ปีที่แล้ว
10:23
Class 5 - Extended Kalman Filter and Unscented Kalman Filter
4 ปีที่แล้ว
14:38
Class 4 - Bayes Filter, Kalman Filter
4 ปีที่แล้ว
23:16
Class 3 Part 2 Hacking Bebop, DIY Research Quadrotor
4 ปีที่แล้ว
24:21
Class 3 Part 1 - Quadrotor Hardware
4 ปีที่แล้ว
31:38
PythonOOP
4 ปีที่แล้ว
7:27
ENAE788M: Class 2 Part 2 - IMU Basics, Attitude Estimation using CF and Madgwick
4 ปีที่แล้ว
24:09
ENAE788M: Class 2 Part 1: Rigid Body Transformations and Rotations
4 ปีที่แล้ว
31:15
ENAE788M: Class 1 Introduction
4 ปีที่แล้ว
7:45
Lecture 10: Factor Graph Based Filtering Using GTSAM
6 ปีที่แล้ว
56:46
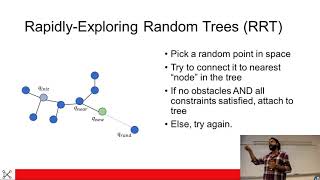
Lecture 7: RRT and D Star
6 ปีที่แล้ว
1:10:50
Lecture 6: Dijkstra and A Star Solved Example
6 ปีที่แล้ว
1:02:35
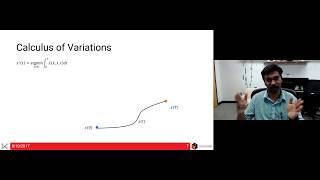
Lecture 8: Trajectory Planning
6 ปีที่แล้ว
21:29
Class 9: Quadrotor HW
6 ปีที่แล้ว
22:16
Lecture 5: Quadrotor Controls
6 ปีที่แล้ว
47:06
Lecture 4: Quadrotor Dynamics
6 ปีที่แล้ว
7:20
Lecture 3: Velocities
6 ปีที่แล้ว
26:29
Lecture 2: Rigid Body Transformations and Rotation Matrices
6 ปีที่แล้ว
31:15
Lecture 1 Part 2: Motion Planning
6 ปีที่แล้ว
45:59
Lecture 1 Part 1: Course Logistics
6 ปีที่แล้ว
7:52