Home
Resolution-Optimal Motion Planning for Steerable Needles
1 ปีที่แล้ว
1:03
Toward Certifiable Motion Planning for Medical Steerable Needles
1 ปีที่แล้ว
4:58
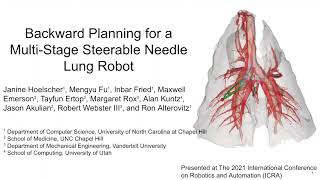
Backward Planning for a Multi-Stage Steerable Needle Lung Robot
1 ปีที่แล้ว
10:58
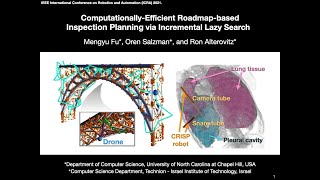
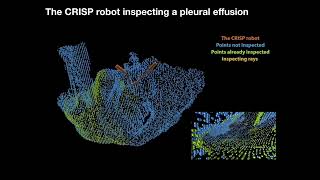
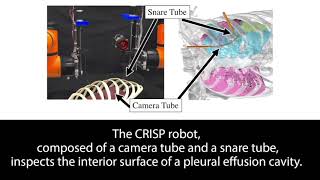
Computationally-Efficient Roadmap-based Inspection Planning via Incremental Lazy Search
1 ปีที่แล้ว
11:40
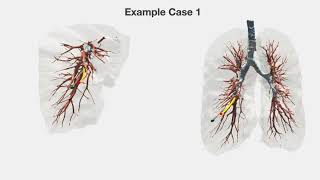
Design Considerations for a Steerable Needle Robot to Maximize Reachable Lung Volume
1 ปีที่แล้ว
12:27
Inspection Planning for Robots via Efficient Near-Optimal Graph Search
1 ปีที่แล้ว
4:03
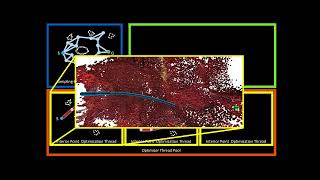
Planning High-Quality Motions for Concentric Tube Medical Robots in Point Clouds
1 ปีที่แล้ว
0:59
Multilevel Incremental Roadmap Spanners for Reactive Motion Planning
1 ปีที่แล้ว
1:01
Enabling Robots to Understand Incomplete Natural Language Instructions Using Commonsense Reasoning
3 ปีที่แล้ว
1:43
Toward Asymptotically-Optimal Inspection Planning via Efficient Near-Optimal Graph Search
3 ปีที่แล้ว
1:59
Improving Robot Motion Planning and Control Learned from Demonstrations
5 ปีที่แล้ว
1:34
Design Optimization of a Parallel Surgical Robot
5 ปีที่แล้ว
2:55
Closed-Loop Global Motion Planning for Reactive, Collision-Free Execution of Learned Tasks
5 ปีที่แล้ว
3:52
Motion Planning for Learned Mobile Manipulation Tasks using Task-Guided Gibbs Sampling
5 ปีที่แล้ว
1:55
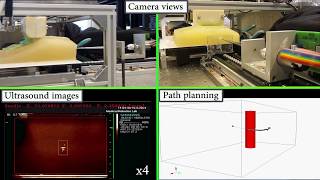
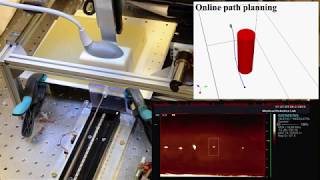
Ultrasound-guided 3D Needle Steering in Biological Tissue
5 ปีที่แล้ว
2:58
Needle Steering in a 3D Non-static Environment Using Ultrasound
5 ปีที่แล้ว
3:11
Needle Steering in Biological Tissue using Ultrasound-based Online Curvature Estimation
5 ปีที่แล้ว
1:00
Interactive Motion Planning for Concentric Tube Robots
5 ปีที่แล้ว
1:24
Robot Motion Planning for Tasks Using Learned Virtual Landmarks
8 ปีที่แล้ว
2:29
Robot Motion Planning for Reactive Execution of Learned Tasks
10 ปีที่แล้ว
3:22
Robot Motion Planning for Learned Tasks
10 ปีที่แล้ว
2:21
Demonstration-Guided Motion Planning for Robotic Assistance
12 ปีที่แล้ว
2:53
Interactive Simulation of Medical Needle Insertion and Steering
12 ปีที่แล้ว
3:07
Guiding Medical Needles Using Tissue Manipulation
12 ปีที่แล้ว
1:12