Home
Pick&Place
4 สัปดาห์ที่ผ่านมา
0:11
Overhead assembly
4 สัปดาห์ที่ผ่านมา
0:20
Our 6 DOF Collaborative Robot Arm
1 เดือนที่ผ่านมา
1:16
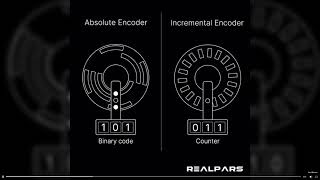
Absolute vs Incremental Encoder
1 เดือนที่ผ่านมา
0:04
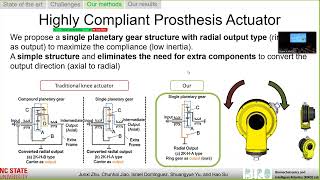
2024-Mechatronics-Actuator optimization and deep learning-based control of pediatric knee Exo
1 เดือนที่ผ่านมา
6:09
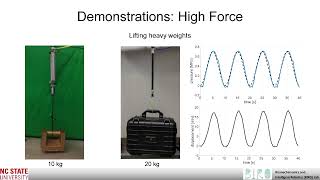
Untethered Fluidic Engine for High-Force Soft Wearable Robots
1 เดือนที่ผ่านมา
2:14
Untethered Fluidic Engine for High-Force Soft Wearable Robots
3 เดือนที่ผ่านมา
2:09
"Brainless" autonomous soft robotic maze escaper
7 เดือนที่ผ่านมา
1:46
BIROlab humanoid leg prototype assembly
1 ปีที่แล้ว
10:57
BIROlab Humanoid Leg Belt Tensioning
1 ปีที่แล้ว
3:40
Tmotor actuation by Rpi(python) using Opensource library "TMotorCANControl"
1 ปีที่แล้ว
7:39
agile bipedal humanoid for household logistics
1 ปีที่แล้ว
0:30
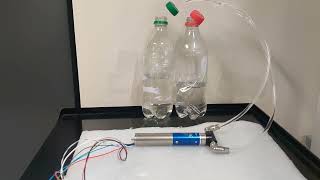
untethered high force electro-hydraulic actuator for artificial muscle of soft robots
1 ปีที่แล้ว
0:18
High-force and compliant cable-driven bi-directional tethered exoskeleton actuator: hip module
1 ปีที่แล้ว
1:46
Untethered High Force Hydraulic Artificial Muscle for Portable Exosuit
1 ปีที่แล้ว
1:50
Ring shaped soft dancing robot self crawls through narrow gaps
1 ปีที่แล้ว
2:27
2022-08-15 - Rutgers - Dr. Doug Kruse's team wears shoulder exoskeleton and gives positive feedback
1 ปีที่แล้ว
2:53
Compliant and Lightweight Knee Exoskeleton (TRO 2022)
1 ปีที่แล้ว
6:08
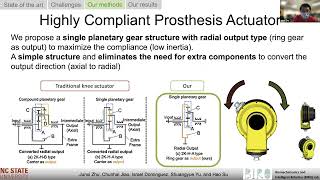
AIM2022: Design and of a High Torque Knee Prosthesis With Intrinsic Compliance for Agile Activities
1 ปีที่แล้ว
4:54
Portable High Torque Robotic Knee Prosthesis With Intrinsic Compliance For Agile Activities-AIM2022
1 ปีที่แล้ว
5:12
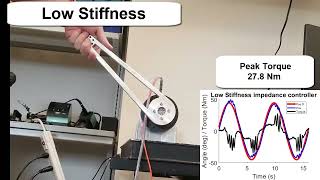
Impedance Control of Quasi Direct Drive Actuators
1 ปีที่แล้ว
0:39
Portable High Torque Robotic Knee Prosthesis With Intrinsic Compliance For Agile Activities
1 ปีที่แล้ว
2:54
Torque Tracking Demo - Speedgoat
2 ปีที่แล้ว
0:41
Torque Tracking Demo -Teensy
2 ปีที่แล้ว
0:16
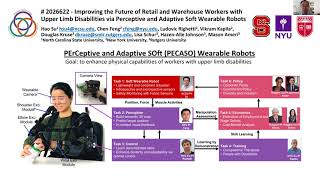
NSF Future of Work Principal Investigator Meeting 2021 12 09
2 ปีที่แล้ว
1:30
2020 ICRA - Pneumatic Ankle Foot Orthosis for Drop Foot Correction
2 ปีที่แล้ว
9:58
2021-05-12 ENGR101 Lecture8 Evolutionary Robotics
2 ปีที่แล้ว
1:30:52
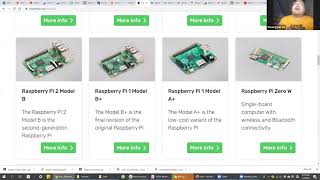
2021-05-05 ENGR101 Lab6
2 ปีที่แล้ว
59:41
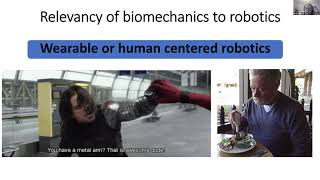
2021-04-28 ENGR101 Lecture7 Biomechanics in Robotics
3 ปีที่แล้ว
1:25:48
2021-04-21 ENGR101 Lab4 Servo motor and relay control DC motor
3 ปีที่แล้ว
58:14