Home
Extending the Knowledge of Volumes Approach to Robot Task Planning
9 ปีที่แล้ว
1:33
Ferns for traffic sign detection - Triforce
9 ปีที่แล้ว
2:44
Feature based Template Tracking - Visionaries
9 ปีที่แล้ว
0:24
Object detection and pose estimation using Features and PnP - Lenna
9 ปีที่แล้ว
1:10
Freespace, Ground-plane estimation and IPM - Bug Busters
9 ปีที่แล้ว
1:37
Robot Task Planning with Contingencies for Run-time Sensing
9 ปีที่แล้ว
1:13
Monocular Visual Odometry - SWAG
10 ปีที่แล้ว
2:25
Intuitive Robot Tasks with Augmented Reality and Virtual Obstacles
10 ปีที่แล้ว
1:38
Keyframe based SLAM - Pixel
10 ปีที่แล้ว
1:43
Five Shades of Grey - fROSt
10 ปีที่แล้ว
4:09
Assignment 2 - Robot Vision Course WS13/14
10 ปีที่แล้ว
4:46
trocar rcm
10 ปีที่แล้ว
1:27
Remote Center Motion Control
10 ปีที่แล้ว
1:24
iRAM!S Simulation
10 ปีที่แล้ว
0:39
Virtual Fixture Control
10 ปีที่แล้ว
1:31
Concept of a kitchen robot
10 ปีที่แล้ว
2:08
Robust RGBD visual odometry using a particle filter - Computer Visionaries
10 ปีที่แล้ว
1:31
KVP: A Knowledge of Volumes Approach to Robot Task Planning
10 ปีที่แล้ว
1:05
Sequence SLAM for place recognition - Grotteneumel
10 ปีที่แล้ว
2:00
Stereo SLAM - A Team
10 ปีที่แล้ว
2:42
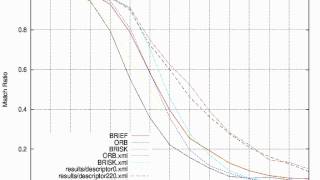
Systematic evaluation of binary feature descriptors - Global Maximum
10 ปีที่แล้ว
1:35
Robotino the follower - Wurzel
10 ปีที่แล้ว
1:12
Assignment 4 - Robot Vision Course WS13/14
10 ปีที่แล้ว
2:25
Assignment 3 - Robot Vision Course WS13/14
10 ปีที่แล้ว
3:55
Assignment 2 - Robot Vision Course SS13
10 ปีที่แล้ว
1:41
Assignment 1 - Robot Vision Course SS 14 - SS 13
11 ปีที่แล้ว
3:08
Motion Planning for Autonomous Vehicles - Waitinglist
11 ปีที่แล้ว
1:46
Color Segmentation in the RoboCup Small Size League - Trashold
11 ปีที่แล้ว
1:40
Real-Time Sperical Mosaicing using Whole Image Alignment - Team 5
11 ปีที่แล้ว
1:51
Key Frame Based SLAM - Gang of Three
11 ปีที่แล้ว
1:40