Home
RI Seminar: Dieter Fox: Where's RobotGPT?
1 วันที่ผ่านมา
1:11:48
Autonomous Drones and AI for Wildfires : CMU Robotics Institute
2 วันที่ผ่านมา
2:38
RI Seminar: Krzysztof Skonieczny : Reduced-Gravity & Field Testing for Lunar and Planetary Rovers
8 วันที่ผ่านมา
1:09:06
Mobot 2024
12 วันที่ผ่านมา
8:40
Yata Memorial Lecture : Jonathan Hurst : Human-Centric Robots and How Learning Enables Generality
2 สัปดาห์ที่ผ่านมา
1:02:31
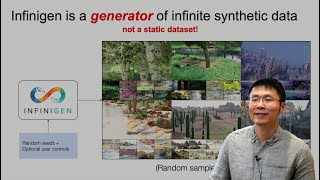
RI Seminar: Jia Deng : Toward an ImageNet Moment for Synthetic Data
3 สัปดาห์ที่ผ่านมา
56:03
RI Seminar: Simon Lucey : Learning with Less
1 เดือนที่ผ่านมา
1:03:50
CMU Graphics Colloquium: C. Karen Liu : Building Large Models for Human Motion
2 เดือนที่ผ่านมา
59:09
RI Seminar: Michael Yip : Teaching a Robot to Perform Surgery
2 เดือนที่ผ่านมา
57:33
RI Seminar: Dr. Robert Ambrose : Robots at the Johnson Space Center and Future Plans
5 เดือนที่ผ่านมา
1:18:04
RI Seminar: Marc Deisenroth : Data-Efficient Learning for Robotics and Reinforcement Learning
6 เดือนที่ผ่านมา
57:27
RI Seminar: Fei Miao : Learning and Control for Safety, Efficiency, and Resiliency of Embodied AI
6 เดือนที่ผ่านมา
1:03:28
RI Seminar: Shuran Song : Learning Meets Gravity: Robots that Learn to Embrace Dynamics from Data
6 เดือนที่ผ่านมา
1:06:25
Extreme (robot) Parkour
6 เดือนที่ผ่านมา
1:23
RoboAgent : AI agent with 12 unique manipulation skills in unknown settings
8 เดือนที่ผ่านมา
3:49
Herb Simon : June 1998 Inventing the Future : Robotics' Growing Role in Cognitive Science
10 เดือนที่ผ่านมา
27:27
PedPal : CMU and pathVu partner to make urban mobility more safe
10 เดือนที่ผ่านมา
3:11
RobotSweater : Fabric Tactile Sensor "Skin"
11 เดือนที่ผ่านมา
3:22
TartanPest : Robotic Solution to Help Seek and Remove Spotted Lanternfly Eggs : Farm-ng Competition
11 เดือนที่ผ่านมา
3:51
16-311 Introduction to Robotics : 2023 Edition!
11 เดือนที่ผ่านมา
1:30
RoboSAR : A Multi-Robot Search and Rescue MRSD Team Project
11 เดือนที่ผ่านมา
1:48
RI Seminar: Vandi Verma : Mars Robots and Robotics at NASA JPL
1 ปีที่แล้ว
56:51
Mobot 2023
1 ปีที่แล้ว
6:25
Brenna Argall : Mobility and Manipulation Independence with Interface-Aware Robotics Intelligence
1 ปีที่แล้ว
53:50
RI Seminar: Phillip Isola : Structures and Environments for Generalist Agents
1 ปีที่แล้ว
1:03:48
RI Seminar: Luca Carlone : Next-Generation Robot Perception...
1 ปีที่แล้ว
1:12:44
RI Seminar: Lerrel Pinto : A Constructivist’s Guide to Robot Learning
1 ปีที่แล้ว
59:33
RI Seminar: David Fouhey : Understanding the Physical World from Images
1 ปีที่แล้ว
1:01:04
RI Seminar: Jorgen Pedersen: RE2 Robotics: from RI spinout to Acquisition
1 ปีที่แล้ว
55:32
RI Seminar: Russ Tedrake : Motion Planning Around Obstacles with Graphs of Convex Sets
1 ปีที่แล้ว
1:02:52