Home
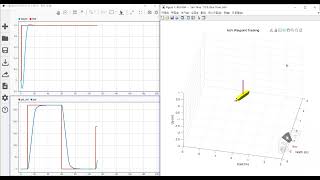
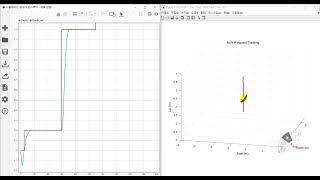
Waypoint following for an over-actuated, hover-capable AUV
9 เดือนที่ผ่านมา
3:55
Transition from hover to flight-style control for an over-actuated, hover-capable AUV
9 เดือนที่ผ่านมา
0:59
Disturbance rejection for an over-actuated, hover-capable AUV
9 เดือนที่ผ่านมา
0:57
Depth & Sway control for an over-actuated, hover-capable AUV (Full motion)
9 เดือนที่ผ่านมา
1:10
Heading control for an over-actuated, hover-capable AUV (Hovering full rotation)
9 เดือนที่ผ่านมา
0:58
Depth control for an over-actuated, hover-capable AUV (Hovering, Depth control)
9 เดือนที่ผ่านมา
1:10
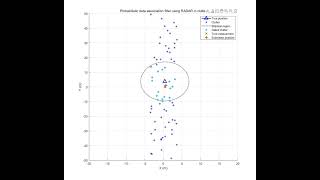
Probabilistic data association filter using RADAR in clutter
1 ปีที่แล้ว
0:42
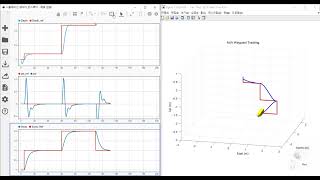
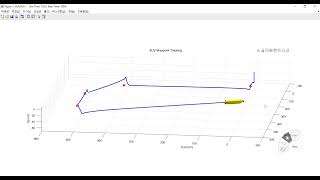
(First trial) Waypoint Follower for REMUS-100 Autonomous Underwater Vehicle (AUV) using Simulink
1 ปีที่แล้ว
2:20
Waypoint Follower for Fixed-Wing UAV using Simulink (First try, additional tuning required)
1 ปีที่แล้ว
3:57
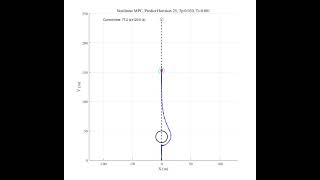
Event triggered nonlinear model predictive control and tracking of USV based on PDAF using RADAR
1 ปีที่แล้ว
0:16
Event triggered nonlinear model predictive control for collision avoidance of USV (rudder-type)
1 ปีที่แล้ว
0:17
Event triggered nonlinear model predictive control for collision avoidance of USV (rudder-type)
1 ปีที่แล้ว
0:17
Event triggered nonlinear model predictive control for collision avoidance of USV
1 ปีที่แล้ว
0:28
Probabilistic data association filter in a clutter environment using RADAR
1 ปีที่แล้ว
0:11
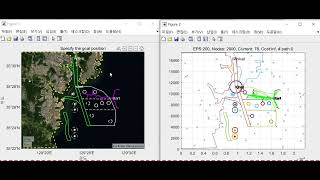
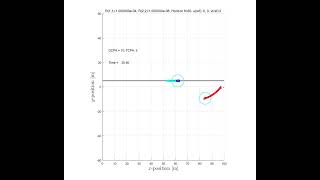
Nonlinear Model Predictive Control of USV for Trajectory Tracking and Collision Avoidance
1 ปีที่แล้ว
0:24
Development of model-based unmanned surface vehicle algorithm for static/dynamic obstacle avoidance
1 ปีที่แล้ว
0:41
[KABOAT2022] 충남대학교 자율운항보트 대회 경기 및 준비 영상(Team FreeV)
1 ปีที่แล้ว
4:06
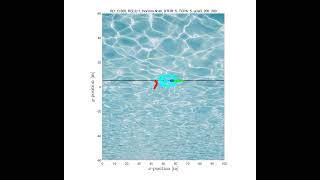
Nonlinear Model Predictive Control of Unmanned Surface Vehicle (Static obstacle)
1 ปีที่แล้ว
0:33
Nonlinear Model Predictive Control of Unmanned Surface Vehicle (Moving obstacle)
1 ปีที่แล้ว
0:33
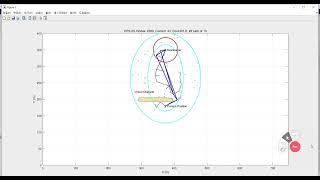
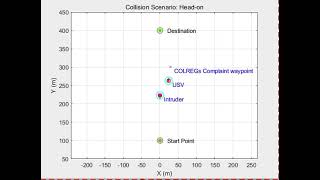
Uncertainty Prediction-Based COLREGs-Compliant Collision Avoidance of USV (Head-on)
1 ปีที่แล้ว
1:40
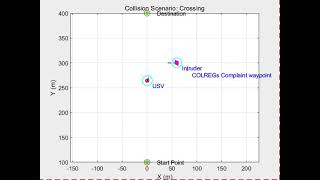
Uncertainty Prediction-Based COLREGs-Compliant Collision Avoidance of USV (Crossing)
1 ปีที่แล้ว
1:59
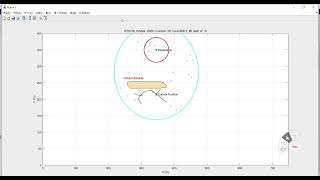
Uncertainty Prediction-Based COLREGs-Compliant Collision Avoidance of USV (Overtaking)
1 ปีที่แล้ว
1:56
COLREGS-compliant collision avoidance based on dynamic model of USV (Crossing)
1 ปีที่แล้ว
2:02
COLREGS-compliant collision avoidance based on dynamic model of USV (Head-on)
1 ปีที่แล้ว
1:44
Informed RRT* for collision avoidance of unmanned surface vehicle
1 ปีที่แล้ว
1:11
Collision avoidance of UAV simulation in Gazebo
2 ปีที่แล้ว
3:27
Software in the Loop for UAS collision detection (2nd case)
3 ปีที่แล้ว
0:34
Software in the Loop for UAS collision detection
3 ปีที่แล้ว
2:15
Collision-free Autonomous Navigation of A Small UAV in GPS-denied Environments
4 ปีที่แล้ว
2:57
Object Tracking and UAV Following Simulation in ORDROID H2
5 ปีที่แล้ว
1:34









![[KABOAT2022] 충남대학교 자율운항보트 대회 경기 및 준비 영상(Team FreeV)](https://i.ytimg.com/vi/f8RuaveM5NA/mqdefault.jpg)