Home
SO(2)-Equivariant Downwash Models for Close Proximity Flight
5 เดือนที่ผ่านมา
1:44
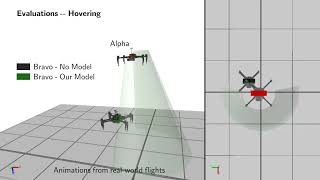
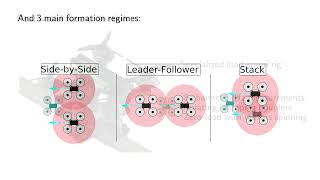
Modelling Aggregate Downwash Forces for Dense Multirotor Flight
6 เดือนที่ผ่านมา
1:22
Docking Multirotors in Close Proximity Using Learnt Downwash Models
6 เดือนที่ผ่านมา
1:54
See What the Robot Can't See: Learning Cooperative Perception for Visual Navigation
9 เดือนที่ผ่านมา
2:27
Heterogeneous Multi-Robot Reinforcement Learning
1 ปีที่แล้ว
4:26
VMAS: A Vectorized Multi-Agent Simulator for Collective Robot Learning
1 ปีที่แล้ว
2:46
Explanation-Aware Experience Replay in Rule-Dense Environments
1 ปีที่แล้ว
3:51
A Framework for Real-World Multi-Robot Systems Running Decentralized GNN-Based Policies
2 ปีที่แล้ว
2:35
ModGNN: Expert Policy Approximation in Multi-Agent Systems with a Modular Graph Neural Network
3 ปีที่แล้ว
1:34
Lecture 10: Introduction to Reinforcement Learning and Outlook
3 ปีที่แล้ว
1:45:54
Lecture 9: Multi-Robot Path Planning
3 ปีที่แล้ว
53:12
Lecture 8: Multi-Robot Assignment Methods
3 ปีที่แล้ว
1:03:09
Lecture 7: Multi-Robot Systems & Collective Motion
3 ปีที่แล้ว
1:06:59
Lecture 6: Navigation & Path Planning
3 ปีที่แล้ว
1:00:50
Lecture 5: Localization
3 ปีที่แล้ว
1:11:31
[CoRL 2020] The Emergence of Adversarial Communication in Multi-Agent Reinforcement Learning
3 ปีที่แล้ว
4:46
[IROS 2020] Graph Neural Networks for Decentralized Multi-Robot Path Planning
3 ปีที่แล้ว
13:58
Lecture 4: Sensors and Perception
3 ปีที่แล้ว
1:11:26
Lecture 3: Motion Control
3 ปีที่แล้ว
1:10:05
Lecture 2: Control Architectures
3 ปีที่แล้ว
1:07:04
Lecture 1: Introduction to Robotics
3 ปีที่แล้ว
1:04:10
[ICRA 2020] Multi-Robot Path Deconfliction through Prioritization by Path Prospects
3 ปีที่แล้ว
9:44
Mobile Robot Path Planning in Dynamic Environments through Globally Guided Reinforcement Learning
3 ปีที่แล้ว
1:42
[AAMAS 2020] Culture-Based Explainable Human-Agent Deconfliction
3 ปีที่แล้ว
11:54
[ICRA 2020] An Adversarial Approach to Private Flocking in Mobile Robot Teams
3 ปีที่แล้ว
10:16
[AAMAS 2020] Multi-Vehicle Mixed-Reality Reinforcement Learning for Autonomous Multi-Lane Driving
3 ปีที่แล้ว
8:58
The Emergence of Adversarial Communication in Multi-Agent Reinforcement Learning
3 ปีที่แล้ว
1:40
Graph Neural Networks for Decentralized Multi-Agent Path Planning
4 ปีที่แล้ว
1:12
Multi-Vehicle Mixed-Reality Reinforcement Learning for Autonomous Multi-Lane Driving
4 ปีที่แล้ว
1:52
A Fleet of Miniature Cars for Experiments in Cooperative Driving
5 ปีที่แล้ว
2:31










![[CoRL 2020] The Emergence of Adversarial Communication in Multi-Agent Reinforcement Learning](https://i.ytimg.com/vi/YGrDcR2yj_E/mqdefault.jpg)
![[IROS 2020] Graph Neural Networks for Decentralized Multi-Robot Path Planning](https://i.ytimg.com/vi/I9Zwn3F_M9M/mqdefault.jpg)


![[ICRA 2020] Multi-Robot Path Deconfliction through Prioritization by Path Prospects](https://i.ytimg.com/vi/ydm4FKgXWwM/mqdefault.jpg)

![[AAMAS 2020] Culture-Based Explainable Human-Agent Deconfliction](https://i.ytimg.com/vi/0SPTTSp1GLc/mqdefault.jpg)
![[ICRA 2020] An Adversarial Approach to Private Flocking in Mobile Robot Teams](https://i.ytimg.com/vi/67NcQNMPOVU/mqdefault.jpg)
![[AAMAS 2020] Multi-Vehicle Mixed-Reality Reinforcement Learning for Autonomous Multi-Lane Driving](https://i.ytimg.com/vi/bSgOBrWMny8/mqdefault.jpg)



