Home
NCCR Robotics: A documentary
1 ปีที่แล้ว
45:27
Swiss Robotics Days 2022: E-quiLibre
1 ปีที่แล้ว
1:11
NCCR Robotics Teaser
1 ปีที่แล้ว
1:11
Swiss Robotics Days 2022 - Teaser
1 ปีที่แล้ว
0:27
NCCR Robotics (2022)
1 ปีที่แล้ว
3:56
NCCR Robotics - Educational robotics (2022)
1 ปีที่แล้ว
3:44
NCCR Robotics - Mobile robotics (2022)
1 ปีที่แล้ว
4:10
NCCR Robotics - Healthcare robotics (2022)
1 ปีที่แล้ว
3:38
NCCR Robotics Tech Transfer Office and our Spin-Offs
1 ปีที่แล้ว
2:24
NCCR Robotics & Spin-Offs profiles (2021)
1 ปีที่แล้ว
2:35
La robotique en tous genres - Trailer
2 ปีที่แล้ว
0:46
La robotique en tous genres - Episode 2: Le nouveau langage d'Ada
2 ปีที่แล้ว
13:10
La robotique en tous genres - Episode 1: Voyage au pays des robots
2 ปีที่แล้ว
12:48
Giacomo Valle: Wearable robotics for amputees: neuro-integrated bionic limbs
2 ปีที่แล้ว
34:12
The Swiss Robotics Day 2021 on SRF (2 November 2021)
2 ปีที่แล้ว
4:04
Lorenz Wellhausen: Rough Terrain Planning and Navigation for Legged Robots
2 ปีที่แล้ว
22:18
Enrica Soria: Predictive control of aerial drone swarms in cluttered environments
2 ปีที่แล้ว
22:51
Victor Reijgwart: Large Scale Volumetric Mapping and Exploration
2 ปีที่แล้ว
22:13
The future of Aerial Robotics: panel at the pop-up House of Switzerland
2 ปีที่แล้ว
1:33:41
Laura Paez: Emergence of robust self-organized undulatory swimming based on local hydrodynamic...
2 ปีที่แล้ว
25:03
Maximilian Brunner: Advances in Aerial Manipulation
2 ปีที่แล้ว
20:02
Dario Mantegazza: Neophobic Mobile Robots Avoid Potential Hazards
2 ปีที่แล้ว
27:55
Philipp Foehn: Drone Racing: A milestone for mobile robotics
2 ปีที่แล้ว
18:34
#NCCRWomen: Enrica Soria, Engineer
2 ปีที่แล้ว
1:21
Matteo Macchini: Body Machine Interfaces for Advances Human Robot Interaction
2 ปีที่แล้ว
22:03
Michele Xiloyannis: Physical Therapy and Outdoor Assistance with the Myosuit
2 ปีที่แล้ว
16:31
Won Dong Shin: Development and application of a series parallel elastic actuation
2 ปีที่แล้ว
24:08
Valentin Wüest: Vision based Accurate Flight for Fixed wing Drones
2 ปีที่แล้ว
15:12
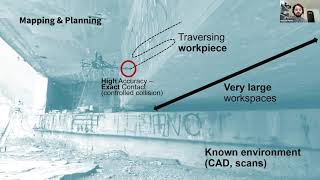
Michael Pantic: Towards aerial manipulation in large workspaces
2 ปีที่แล้ว
21:34
Chang Gao: Recurrent Neural Network Control of a Hybrid Dynamic Transfemoral Prosthesis with EdgeDR
2 ปีที่แล้ว
24:01