Home
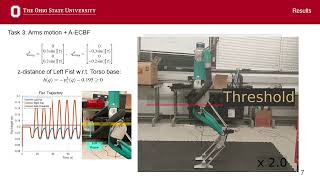
Safe Whole-Body Task Space Control for Humanoid Robots
6 เดือนที่ผ่านมา
1:00
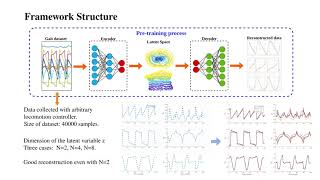
Data-Driven Latent Space Representation for Robust Bipedal Locomotion Learning
7 เดือนที่ผ่านมา
2:31
Template Model Inspired Task Space Learning for Robust Bipedal Locomotion
7 เดือนที่ผ่านมา
1:01
Velocity Regulation of 3D Bipedal Walking Robots Through Adaptive Neural Network Controller
7 เดือนที่ผ่านมา
1:00
Towards Standardized Disturbance Rejection Testing of Legged Robot Locomotion with Linear Impactor
7 เดือนที่ผ่านมา
3:01
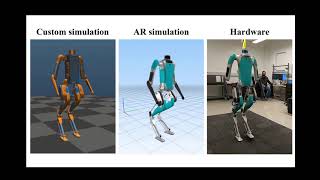
Real-Time Navigation for Bipedal Robots in Dynamic Environments
1 ปีที่แล้ว
3:00
Safe Path Planning for Polynomial Shape Obstacles via CBF and Logistic Regression
1 ปีที่แล้ว
1:42
Reinforcement Learning-Based Cascade Motion Policy Design for Robust 3D Bipedal Locomotion
1 ปีที่แล้ว
3:00
Resolved Motion Control for 3D Underactuated Bipedal Walker using LIP dynamics and Neural Adaptation
2 ปีที่แล้ว
1:26
Robust Feedback Motion Policy Design Using Reinforcement Learning on a 3D Digit Bipedal Robot
3 ปีที่แล้ว
3:02
Digit walking and rejecting small disturbances.
3 ปีที่แล้ว
0:53
First steps of stable exoskeleton walking with the OSU controller
4 ปีที่แล้ว
1:48
HZD Inspired Reinforcement Learning for 3D Bipedal Walking
4 ปีที่แล้ว
2:32