Home
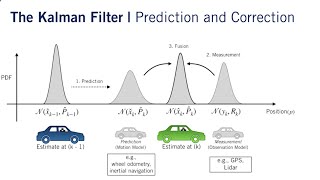
Understanding Sensor Fusion and Tracking, Part 3: Fusing a GPS and IMU to Estimate Pose
MATLAB
23 ต.ค. 2019
การดู 129,252 ครั้ง
Understanding Sensor Fusion and Tracking, Part 4: Tracking a Single Object With an IMM Filter
Understanding Sensor Fusion and Tracking, Part 2: Fusing a Mag, Accel, & Gyro Estimate
โทรศัพท์สมาร์ทโฟนของคุณ รู้ตำแหน่งของคุณได้อย่างไร ? - Wilton L. Virgo
3D Tracking with IMU
Understanding SLAM Using Pose Graph Optimization | Autonomous Navigation, Part 3
Begini Cara Teknologi Pertanian Modern Sukses Membudidayakan Nanas di Kosta Rika Dan Meksiko
Understanding Sensor Fusion and Tracking, Part 1: What Is Sensor Fusion?
Visually Explained: Kalman Filters
Accelerometers and Gyroscopes - Sensor Fusion #1 - Phil's Lab #33
Kalman Filter & EKF (Cyrill Stachniss)
Kalman Filter - Part 1
DANGEROUS Kids Reacting To Life Sentences...
Kalman Filter for Beginners, Part 3- Attitude Estimation, Gyro, Accelerometer, Velocity MATLAB Demo
Understanding Sensor Fusion and Tracking, Part 5: How to Track Multiple Objects at Once
The Difference Between IMU, AHRS, and INS
How GPS Works Today
Kalman filter test for sensor fusion (GPS + accelerometer)
Extended Kalman Filter Software Implementation - Sensor Fusion #4 - Phil's Lab #73