Home
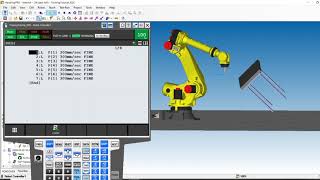
Joint, linear and circular movements with FANUC robots / FINE and CNT termination types
Future Robotics
21 ต.ค. 2020
การดู 27,984 ครั้ง
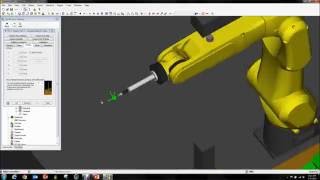
How to teach TCP on FANUC robots / What is TCP
How to do do robot mastering / FANUC remastering / calibration / zero position ?
Fanuc Robot Tutorial 1: Starting the Robot, Clearing Faults, and Jogging Modes (Joint and World)
FANUC iRVision - How To Set Up A FANUC 3D Area Sensor in ROBOGUIDE
Introduction to Fanuc Robot
FANUC Roboguide Tutorial
PTP and Linear Movements Explained| The Robotics Channel
How to teach User Frame on FANUC robot / UFRAME ?
Step by step jogging – learn to manually move a FANUC robot
Solidworks tutorial | Design and Assembly of Bicycle in Solidworks
Fanuc Robot Tutorial 2: Defining User Frames and Moving in User Frames
Fanuc Robot Tutorial 3: Introduction to Robot Coding - Write a Simple Code Using Teach Method
Programación a nivel básico del robot Fanuc M10-iA (joint, línea, arco de círculo y ciclos).
FANUC Mastering
How does Position Registers work in FANUC, how to program FANUC Position Registers
FANUC User Frame Setup and Strategy
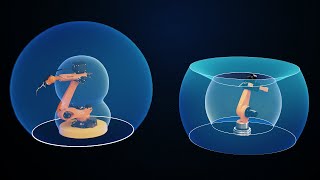
Understanding Work Envelopes of Robots!
Fanuc Robotics Motion Instructions
FANUC robot logic - JMB LBL, CALL, WAIT instructions / Non-conditional statements / Branching pt. 1
FANUC programming tutorial pt. 2 - Simple pick and place application. Fully functional program.