Home
Fast Obstacle AvoidanceBased on Real-Time Sensing
LASA
31 ธ.ค. 2022
การดู 1,351 ครั้ง
Avoiding Dense and Dynamic Obstacles in Enclosed Spaces: Application to Moving in Crowds
EMG-driven shared human-robot compliant control for in-hand object manipulation in hand prostheses
Neural Joint Space Implicit Signed Distance Functions for Reactive Robot Manipulator Control
Dual-arm control for coordinated fast grabbing and tossing of an object
Multi-Contact Whole-Body Force Control for Position-Controlled Robots
Safety Assessment for Personal Mobility Devices (PMD) and Service Robots
Bimanual dynamic grabbing and tossing of objects onto a moving target
SAHR Project Presentation
Reactive Collision-Free Motion Generation in Joint Space via Dynamical Systems and MPC (MPPI)
A Cable-Driven Parallel Robot with Aerial and Ground Mobile Bases
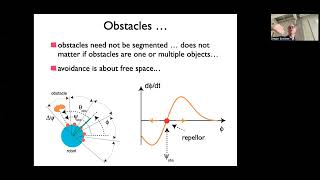
Avoidance of Concave Obstacles through Rotation of Nonlinear Dynamics
The AI Humanoid Robots Race is getting CRAZY
Dynamical System Modulation For Obstacle Avoidance of Decentralized Swarms
"SHOURYA" THE SPACE ROVER DEVELOPED AT NMIT, BLORE
Artificial intelligence Destroys life in the Universe!
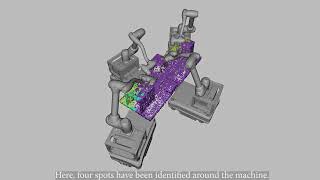
Adaptive Vision-Based Cleaning of Industrial Workstations Using a Collaborative MM Arm
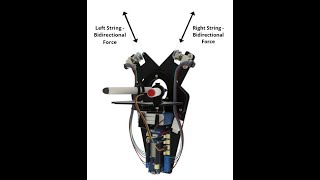
Arduino Based Control & Path Following of a String Driven 2D Drawing Robot
Biased-MPPI: Informing Sampling-Based Model Predictive Control by Fusing Ancillary Controllers
CrossLoco: Human Motion Driven Control of Legged Robots via Unsupervised Reinforcement Learning
Attractor dynamics approach to vehicle movement generation: Sub-symbolic