Home
A Sparse Gaussian Approach to Region-Based 6DoF Object Tracking - Real-World Experiments
DLR RM
2 ต.ค. 2020
การดู 3,334 ครั้ง
DOT: Dynamic Object Tracking for Visual SLAM
A Sparse Gaussian Approach to Region-Based 6DoF Object Tracking - Approach and Evaluation
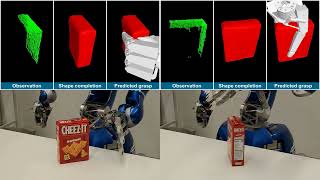
Shape Completion and Grasp Prediction for Fast and Versatile Grasping with a Multi-Fingered Hand
ARCHES crater exploration
Musculoskeletal Wheeled Robot Musashi-W for Real-World Applications (Humanoids 2022)
Iterative Corresponding Geometry (ICG) - Highly Efficient 3D Object Tracking - CVPR 2022
Gaussian Mixture Model | Object Tracking
Accuracy meets Safety: PID and ESP Control in Elastic Robots
เรื่องนี้มันต้องรู้ !! ก่อนเริ่มเขียนโปรแกรม
A Multi-body Tracking Framework - From Rigid Objects to Kinematic Structures
Fusing Visual Appearance and Geometry for Multi-Modality 6DoF Object Tracking
Build a Realtime Chat App in React Native (tutorial for beginners) 🔴
Space technology in the operating room - medical robotics at DLR (MIRO Innovation Lab)
Estimator-Coupled Reinforcement Learning for Robust Purely Tactile In-Hand Manipulation
Tokyo Robotics: Torobo Arm's active compliance
DeepIM: Deep Iterative Matching for 6D Pose Estimation
Model-based tracking combining moving edges and dense depth information
เทคนิคการ Prompt และการใช้งาน CHAT GPT
30+ FPS 3D Object Detection with MediaPipe and OpenCV: The Latest Breakthrough in CPU Processing