Home
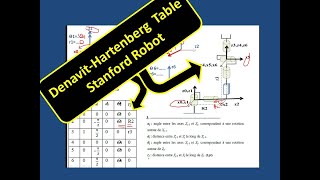
Denavit – Hartenberg modelling for cylindrical Robot
Tanveer Saleh
27 ต.ค. 2021
การดู 38,892 ครั้ง
Video Tutorial on forward kinematic for RPR robot
Worked Example - Frame Assignment | DH Tables | Transformation Matrices (Direct Kinematics IV)
Análisis de POSICIÓN de un Manipulador 3R. Utilizando Denavit - Hartenberg. Solución simbólica.
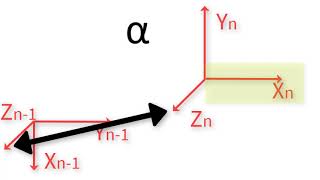
Denavit-Hartenberg Reference Frame Layout
Robotics 1 U1 (Kinematics) S5 (HTM) P2 (HTM by Denavit Hartenberg)
พื้นฐานวิทยาการหุ่นยนต์ : การสร้างตาราง DH พารามิเตอร์
6 Axis Robot Forward & Inverse Kinematics Tutorial - Denavit Hartenberg Parameters With the AR4-MK2
Cinemática Directa de Robot de 6 grados de libertad por Denavit Hartenberg
Méthode de Denavit Hartenberg
04: Direkte und Inverse Kinematik, Denavit-Hartenberg Konvention, Jacobi-Matrizen
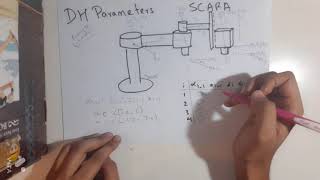
DH Parameters | SCARA
Denavit–Hartenberg parameters of a 3-link manipulator with prismatic joint - Example
Algoritmo Denavit-Hartenberg y ejemplo de aplicación robot antropomórfico RRR
Robotics 2 U1 (Kinematics) S2 (Denavit-Hartenberg) P3 (Parameter Table)
LEZIONE 06 (Week_03_b): Esempi applicativi della convenzione di D-H
Creating Transformation Matrices From DH Tables | Robotics (Direct Kinematics III)
Animation vs Physics เล่าให้ฟัง ทีละเฟรม | MLHF
Lecture 17 Robotics | DENAVIT HATENBERG PRINCIPLE | FRAME REPRESENTATION
Robot Kinematiği | Soru 1 - İleri ve ters kinematik
#Modèle #géométrique de #robots #series : 2- #Robot #Stanford #paramètres #dh #denavit-hartenberg