Home
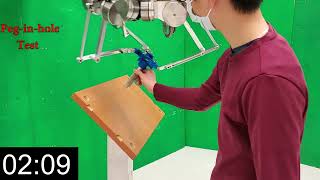
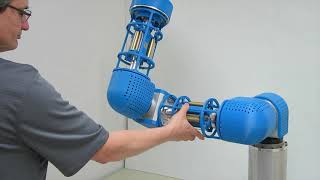
Low-Impedance Physical Human-Robot Interaction using an Active-Passive Dynamics Decoupling
Laboratoire de robotique de l'université Laval / Laval University Robotics Laboratory
26 ก.ค. 2016
การดู 1,522 ครั้ง
A Lightweight Modular Segment Design for Tendon-Driven Continuum Robots
Backdrivable Parallel SCARA robot for pHRI including built-in gripper with unlimited rotation
Underactuated backdrivable gripper with scooping capabilities
Kinematically redundant (6+2)-Degree-of-Freedom parallel robot with large tilt rotation capabilities
Backdrivable Macro-mini robotic system for intuitive pHRI
ทำไมอังกฤษ บาลี สันสกฤต มาจากภาษาเดียวกัน?
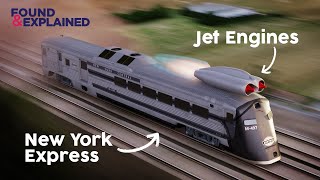
What if we put jet engines on top of a New York train car? - The Jet-Powered Black Beetle
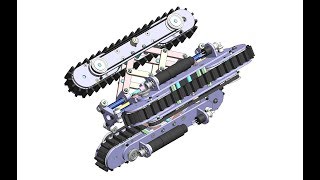
ICRA 2014: In-pipe Robot with Underactuated Parallelogram Crawler Modules
ไม่เคยไปแล้วรู้ได้ยังไง? นักวิทยาศาสตร์รู้ได้อย่างไรว่าบนดาวเคราะห์ต่างๆ มีอะไรบ้าง
6 สิ่งประดิษฐ์ ที่ได้แรงบันดาลใจมาจากสัตว์
Reorientation of Free-Falling Legged Robots
104專題:模擬眼球控制機制之影像追蹤系統 Agile Eye 李聖復 李貢彰
Grasping and Scooping using the Redundant Degrees of Freedom of a Parallel Robot
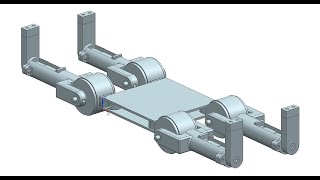
Twist Snake: Plastic table-top cable-driven robotic arm with all motors located at the base link
Moog 6DOF ElectroMechanical Motion Base Utilized for Liquefied Natural Gas Ship Study
Low-Impedance Displacement Sensors for Intuitive Physical Human-Robot Interaction
Galvano Gimbaled Mirror
Whole-body Intuitive pHRI with Flexible Robots Using Non-collocated Proprioceptive Sensing
Spherical Parallel Manipulator
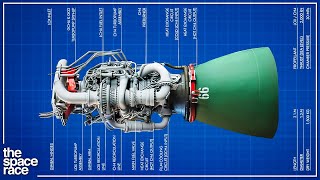
How SpaceX Reinvented The Rocket Engine!