Home
Learning Low-Frequency Motion Control for Robust and Dynamic Robot Locomotion
Oxford Dynamic Robot Systems Group
1 มี.ค. 2023
การดู 617 ครั้ง
RLOC: Terrain-Aware Legged Locomotion using Reinforcement Learning and Optimal Control
Learning and Deploying Robust Locomotion Policies with Minimal Dynamics Randomization
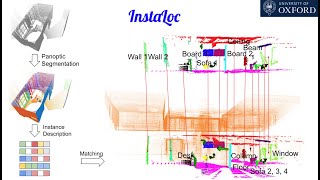
InstaLoc: One-shot Global Lidar Localisation in Indoor Environments through Instance Learning
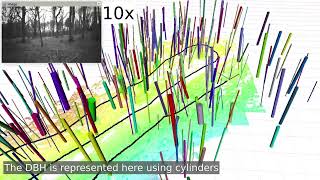
Towards Real-Time Forest Inventory using Handheld LiDAR
3D Lidar Reconstruction with Probabilistic Depth Completion for Robotic Navigation - IROS 2022
R-LGP:A Reachability-guided LGP Framework for Optimal Task and Motion Planning on Mobile Manipulator
Deep IMU Bias Inference for Robust Visual-Inertial Odometry With Factor Graphs
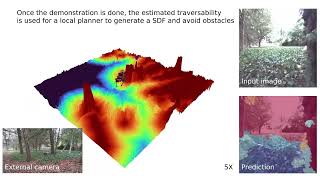
Fast Traversability Estimation for Wild Visual Navigation
Strategies for Large Scale Elastic and Semantic LiDAR Reconstruction
Inspection of Energy Facilities with Legged Robots
Extrinsic Calibration of Camera to LIDAR using a Differentiable Checkerboard Model
Automated Inspection of Construction with Legged Robots
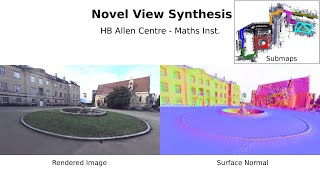
SiLVR: Scalable Lidar-Visual Reconstruction with Neural RadianceFields for Robotic Inspection
Factor Graph Fusion of GNSS Sensing with IMU and Lidar for Robot Localization w/o a Base Station
Mapping Oxford's Sheldonian Theatre
Language-EXtended Indoor SLAM (LEXIS): A Versatile System for Real-time Visual Scene Understanding
Osprey: Multi-Session Autonomous Aerial Mapping with LiDAR-based SLAM and Next Best View Planning
Starship Flight 4 Update // Giant Stars Disappearing // Volcanoes on Venus
LiSTA: Geometric Object-Based Change Detection in Cluttered Environments
Batch Differentiable Pose Refinement for In-The-Wild Camera/LiDAR Extrinsic Calibration