Home
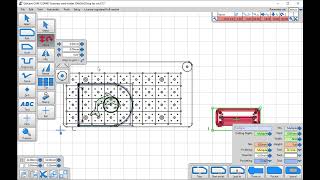
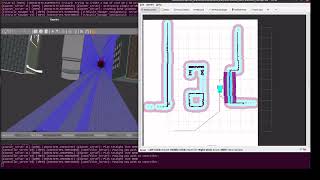
ROS-based 2D path coverage planning and tracking with LiDAR (simulation) for an used-defined area
Alexander Grau
30 ม.ค. 2022
การดู 1,049 ครั้ง
Path Planning with A* and RRT | Autonomous Navigation, Part 4
ROS2 Occupancy Grid Node for Nav2
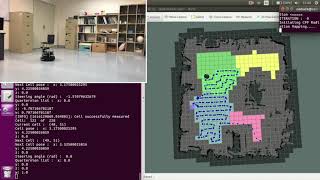
SLAM Robot Mapping - Computerphile
Fast line follower Robot
Estlcam12 Add and Tile
Vitulus - 3D printed ROS based robotic lawn mower
Why Some Designs Are Impossible to Improve: Quintessence
Garuda Linux Hyprland Setup March'24 by YSL
ผู้ก่อตั้ง Kaidee: การมาของ ChatGPT จะเปลี่ยนวิธีการหาข้อมูลของเราตลอดไป | The Rise of Intelligence
Coverage Path Planning Algorithm with ROS
Navigation, Path Planning & Control Using amcl Package | ROS Tutorials for Beginners | Lesson 8
Tutorial how to connect simpleRTK2B RTK receiver to smartphone by Bluetooth
Ros2 Nav2 custom planner plugin
Coverage Path Planning and K-Means Partitions on Turtlebot
simpleRTK2B Starter Kit LR from ArduSimple. Set of Base and Rover based on ZED-F9P + ANN-MB antenna
Borg Cube Network Server
Pure Pursuit Path Tracking Algorithm
Clothoid-Based Global Path Planning for Autonomous Vehicles in Urban Scenarios
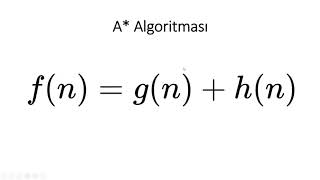
A* Algoritması
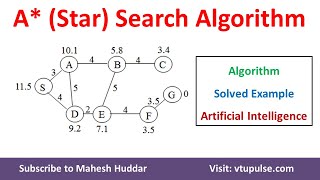
A* (A Star) Search Algorithm with Solved Example in Artificial Intelligence by Dr. Mahesh Huddar