Home
ROS2 Nav2 Integration : Understanding YAML Parameters for Planners, Costmaps, and Velocities
Muhammad Luqman
12 พ.ค. 2023
การดู 4,776 ครั้ง
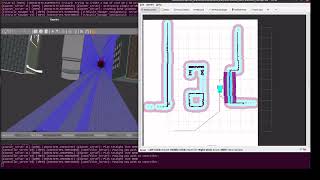
ROS2 Nav2 Integration : Understanding YAML Parameters for Planners, Costmaps, and Velocities
Understanding Autonomous Navigation in ROS2: Mapping, Planning, and Execution
Hobgoblin Spider-Man Villain AI
[ROS2 Q&A] 232 - How to follow waypoints using nav2
ROS 2 | TurtleBot3 SLAM and Autonomous Navigation with Sim2Real Transfer [Tutorial]
Exploring Autonomous Navigation with Isaac SIM and NVIDIA Carter | ROS Nav2 Tutorial
ROS2 - Visualize TFs for a Robot with RViz and tf2_tools
Write Python ROS (Robot Operating System) Publisher/Subscriber Nodes and Interface with Arduino
Mathematics in Robotics : Go to Goal in ROS2
Marathon2: Testing robustness of ROS2 Navigation2
ROS 2 Tutorial 1: Learn the Basics of ROS 2 by Using Turtlesim Simulation
Correct Installation of TurtleBot3 Robot Model in ROS + Visualization and Control in RViz
ROS 2 Navigation - Part 4.2 ( Nav2 Project - build a Patrolling Robot)
[ROS Q&A] 168 - What are the differences between global and local costmap
[Lab Meeting] Model Predictive Path Integral의 소개, 서울대학교 동적로봇시스템연구실
Ros2 Nav2 custom planner plugin
ROS2 - YAML Parameters
Create an Environment with RMF Traffic-Editor | ROS2 Developers Open Class #159
ROS2 - How to Publish TFs using URDF and Robot State Publisher




![[ROS2 Q&A] 232 - How to follow waypoints using nav2](https://i.ytimg.com/vi/KIbgZqfppAI/mqdefault.jpg)
![ROS 2 | TurtleBot3 SLAM and Autonomous Navigation with Sim2Real Transfer [Tutorial]](https://i.ytimg.com/vi/-4Ewuhfgbx8/mqdefault.jpg)




![[ROS Q&A] 168 - What are the differences between global and local costmap](https://i.ytimg.com/vi/qPNs6pAZGtA/mqdefault.jpg)
![[Lab Meeting] Model Predictive Path Integral의 소개, 서울대학교 동적로봇시스템연구실](https://i.ytimg.com/vi/NZq174iwGso/mqdefault.jpg)