Home
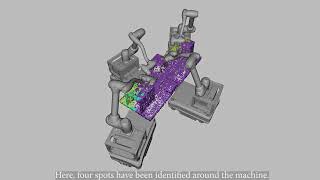
[IROS 2024 DEMO]Coarse-to-Fine Point Cloud Registration for AMR Navigation in Unstructured Orchard
Yuenan Zhao
17 มี.ค. 2024
การดู 242 ครั้ง
Team Aurora IRoC u 2024 Rover Demo Video
IROS 2022 Talk: FAR Planner: Fast, Attemptable Route Planner using Dynamic Visibility Update
[IROS 2024]Part 2 Coarse-to-Fine Point Cloud Registration for AMR Navigation in Unstructured Orchard
Starship Flight 4 Wet Dress Rehearsal | SpaceX Boca Chica
Mobile Robot with HECTOR SLAM Implementation
Adaptive Vision-Based Cleaning of Industrial Workstations Using a Collaborative MM Arm
Autonomous Robotic Platform for Orchard and Pasture Field Navigation
Robust, Visual-Inertial State Estimation: from Frame-based to Event-based Cameras
spring balancing
Autonomous Navigation of Car-Like Wheelchair in Campus Scale Environments (In progress)
Introduction to CAFE Project (Movie-clip for ICRA2024)
Vintage Spring Paintings Art For Your TV | Vintage Art Slideshow For Your TV | TV Art | 4K | 3.5Hrs
Gas Source Localization in Unknown Indoor Environments
I Accidentally Photographed Something Unknown During the Eclipse - Smarter Every Day 298
Line Following Robot
Figure Status Update - OpenAI Speech-to-Speech Reasoning
DTAM: Dense Tracking and Mapping in Real-Time
TOP 5 OPEN SOURCE 3D PRINTED ROBOTS
Presentation NSU RAS Towards Autonomy: A short introduction to the basic building blocks of Robotics
LIMO COBOT WAREHOUSE SIMULATION SCENCE



![[IROS 2024]Part 2 Coarse-to-Fine Point Cloud Registration for AMR Navigation in Unstructured Orchard](https://i.ytimg.com/vi/Yj9QTwkCevU/mqdefault.jpg)