Home
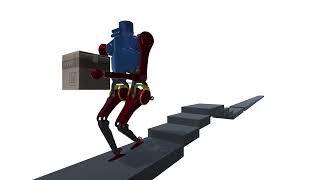
Hybrid iLQR Model Predictive Control for Contact Implicit Stabilization on Legged Robots
Robomechanics Lab
6 พ.ย. 2023
การดู 434 ครั้ง
Increasing the reliability of legged robots in the presence of uncertainty
Pulkit Agrawal - RSS 2022: The Science of Bumping Into Things
ดนตรีรักษาหัวใจและหลอดเลือด🌿 เพลงผ่อนคลาย ฟื้นฟูระบบประสาท ผ่อนคลาย #41
Contact-Implicit MPC: Controlling Diverse Quadruped Motions Without Pre-Planned Contact Modes
무드있는 잔잔한 팝송 플리🌙 감성 팝송 모음 | 적당한 비트, 책읽을때 듣기 좋은 음악 | Design making tutorial
Vintage Spring Paintings Art For Your TV | Vintage Art Slideshow For Your TV | TV Art | 4K | 3.5Hrs
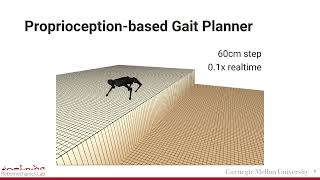
Learning Generic and Dynamic Locomotion of Humanoids Across Discrete Terrains
ดนตรีบำบัดหัวใจและหลอดเลือด 🌿 ทำให้ระบบประสาทสงบและทำให้จิตใจสงบ ดนตรีอ่อนโยน #36
Microspine Design for Additive Manufacturing
Continuous Dynamic Bipedal Jumping via Adaptive-model Optimization
Smart MPC(iLQR)による倒立振子の振り上げ学習
คาถาเงินล้าน อิติปิโส 108 จบ 3 ซม. 55 นาที สวดเป็นประจำชีวิตเปลี่ยน
The Uncertainty Aware Salted Kalman Filter
Proprioception and reaction for walking among entanglements
LORIS: A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
Car parking using iLQR MPC
MusashiOLegs - Musculoskeletal Legs with Planar Interskeletal Structures (Humanoids 2020)
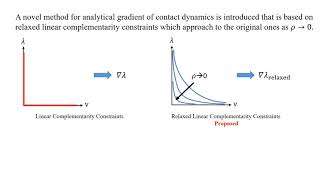
Contact-Implicit Differential Dynamic Programming for Model Predictive Control(2022 IROS)
VJ Loop Neon Red Yellow Tunnel Abstract Background Geometric Pattern - VJ Loop 4k - Wallpaper
Proprioception and Tail Control Enable Extreme Terrain Traversal by Quadruped Robots