Home
KITTI 3D Data Visualization | Homogenous Transformations | Perception for Self Driving Cars
Robotics with Sakshay
1 ธ.ค. 2021
การดู 4,732 ครั้ง
Multi Task Attention Network (MTAN) | Multi Task Learning | Perception for Self Driving Cars
Sensor Fusion for Autonomous Vehicles: Strategies, Methods, and Tradeoffs | Synopsys
Current Approaches and Future Directions for Point Cloud Object Detection in Intelligent Agents
The KITTI Vision Benchmark Suite
UNetXST | Camera to Bird's Eye View | Perception for Self Driving Cars
Deep SORT | Object Tracking | Perception for Self Driving Cars
คอร์สเรียนพื้นฐาน HTML5 สำหรับผู้เริ่มต้น 👨💻
การสร้างแผนที่ 3D สวยๆ ง่ายๆ แค่ลากวาง
KITTI-360: A Novel Dataset and Benchmarks for Urban Scene Understanding in 2D and 3D
Introduction to ROS | Part - 1 | ROS Learning Series
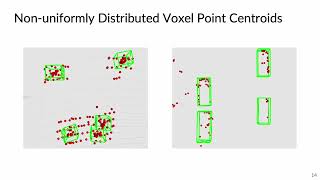
Point Density-Aware Voxels for LiDAR 3D Object Detection
CV3DST - 3D Detection, Segmentation and Tracking
VoxelNet: End-to-End Learning for Point Cloud Based 3D Object (PAPER EXPLAINED)
สอนพื้นฐาน Excel ตั้งแต่เริ่มต้น แบบครบจบในคลิปเดียว!!
How To Visualize LiDAR Point Cloud In Python | KITTI Dataset
3D Deep Learning with PyTorch3D by Nikhila Ravi
Google Sheets Advanced Tutorial
Frenet Frames | Self Driving Cars | Motion Planning for Robots
How do Self Driving Cars work ? Perception and Detection
KITTI-360