Home
Sensor Fusion in Mobile Autonomous Robot | ROS | IMU+Wheel Odometry | Kalman Fliter | Jetson Nano
Robotics and ROS Learning
Apr 19, 2021
31,295 views
Autonomous Navigation Mobile Robot using ROS | Jetson Nano | RPLidar | Differential Drive Kinematics
TOP 5 IoT PROJECTS || IoT Final Year Project Ideas || Electronic Engineering Project Ideas.
wheeled robot control and odometry
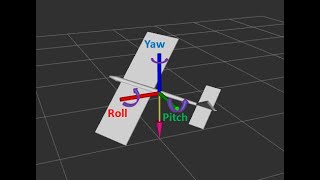
Roll Pitch Yaw from IMU Sensor and Vizualizing it in RVIZ ROS | MPU6050 | Jetson Nano | I2C
อบรม ROS และ การวางแผนการเคลื่อนที่ของหุ่นยนต์เคลื่อนที่อัตโนมัติ @สสท.(15กพ66)
Robust Odometry and Fully Autonomous Driving Robot | ATCrawler x FAST-LIO x Navigation2
Mark 01 - Differential Robot #4 : Odometry and PID Controller
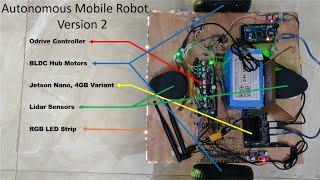
Autonomous Navigation Mobile Robot Version 2 | ROS | Odrive | BLDC Motors| Jetson Nano | RPLidar
Navigation2 in ROS2 | Autonomous Mobile Robot | Nav2 | Behavior Trees | Odrive| Diff drive Robot
Mobile Robot Localization Using Extended Kalman Filter - Part 1: Problem Formulation
Building Your Own Autonomous Navigation Robot
What is Odometry? | An Introduction to the Essence of Robot Odometry Pt. 1
Getting Started with ROS2 Navigation - Episode 6 - IMU and IMU Tools
Localization (fusing odm of encoders with IMU data).
EKF based mobile robot localization
LESSON 16: Controlling a Servo with Arduino
How to Make an Autonomous Mapping Robot Using SLAM
Chapter 11 SLAM and Navigation
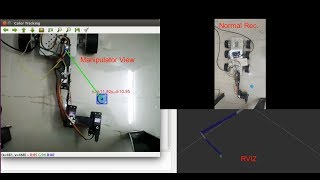
Object tracking robot using ROS Moveit and OpenCV | Arduino
Sensor Fusion: Extended Kalman Filter - Autonomous Car Motion Estimation