Home
Navigation2 in ROS2 | Autonomous Mobile Robot | Nav2 | Behavior Trees | Odrive| Diff drive Robot
1 เดือนที่ผ่านมา
38:30
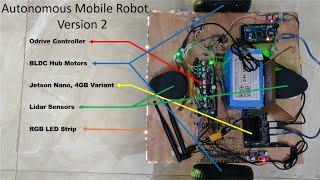
Autonomous Navigation Mobile Robot Version 2 | ROS | Odrive | BLDC Motors| Jetson Nano | RPLidar
1 ปีที่แล้ว
10:05
Sensor Fusion in Mobile Autonomous Robot | ROS | IMU+Wheel Odometry | Kalman Fliter | Jetson Nano
3 ปีที่แล้ว
6:16
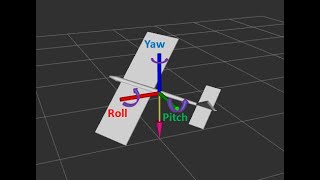
Roll Pitch Yaw from IMU Sensor and Vizualizing it in RVIZ ROS | MPU6050 | Jetson Nano | I2C
3 ปีที่แล้ว
5:02
Object detection and 3D pose estimation from Point cloud using Realsense depth camera | ROS | PCL
3 ปีที่แล้ว
12:05
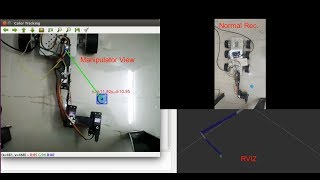
Autonomous Navigation Mobile Robot using ROS | Jetson Nano | RPLidar | Differential Drive Kinematics
3 ปีที่แล้ว
13:26
3D Printed 6 DOF Arm| ROS MOVEIT | UR3 Arm | Inverse Kinematics | Arduino
3 ปีที่แล้ว
4:41
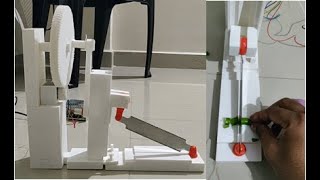
Robotic Vegetable Chopper Part 1 | 3D model | 3D Printing
3 ปีที่แล้ว
6:40
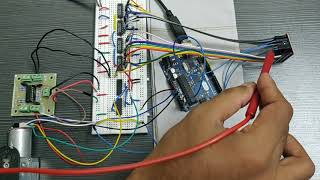
Rotary Encoder As Joint Sensors without Interrupt Routine | DC Motor PID Control | Arduino | I2C
4 ปีที่แล้ว
10:35
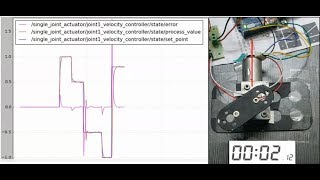
Position and Velocity control of a DC motor Using PID | ROS control | rqt_reconfigure| Arduino
4 ปีที่แล้ว
19:08
Six DOF Robotic Arm performing Pick and Place action using ROS Moveit and OpenCV | Arduino
4 ปีที่แล้ว
9:33
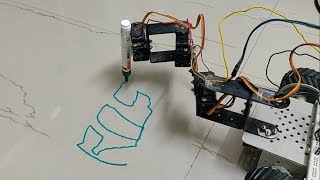
Object tracking robot using ROS Moveit and OpenCV | Arduino
4 ปีที่แล้ว
10:49
Inverse Kinematics and Trajectory Execution of a robot manipulator using ROS Moveit and Arduino.
4 ปีที่แล้ว
17:01