Home
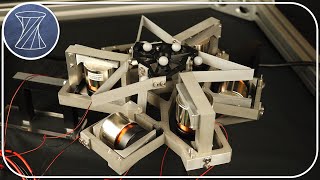
Backdrivable Kinematically Redundant (6+3)-DOF Hybrid Parallel Robot –Part 2:Human–Robot Interaction
Laboratoire de robotique de l'université Laval / Laval University Robotics Laboratory
8 ก.ย. 2020
การดู 54,466 ครั้ง
T-Flex: Compliant Flexure-based Large Range Precision Hexapod
A Lightweight Modular Segment Design for Tendon-Driven Continuum Robots
A backdrivable 6-dof parallel robot for sensorless dynamically interactive tasks
Acrome Stewart Platform
Backdrivable Kinematically Redundant (6+3)-DOF Hybrid Parallel Robot – Part 1: Trajectory Control
DexTAR :: The fastest five-bar parallel robot
Compliant 6-Degree-of-Freedom Precision Motion Stage: The Hexblade Positioner
Talk 09: L. Marchioni, PAL Robotics | ICRA2021 WS on Legged Robots
How Does This Rocket Steer Itself? -- Active Control Rocket Avionics (Building DIAMOND-X Part 2)
Dog Off on ICRA 2019 in Montreal
(6+3) Dofs Kinematically Redundant Parallel Mechanism
Acrome Delta Robot
KINEMATICS | Serial robot vs. Parallel robot (This is not CGI)
High-speed SCARA parallel robot
【Full HD】ABENICS: Active Ball Joint Mechanism With Three-DoF Based on Spherical Gear Meshings
TOP 12 Unique Flying Machines
Cable-driven parallel robots – Motion simulation i
KINEMATICS | Tripteron 3-DOF Cartesian parallel robot (This is not CGI)
SPM - 3D Printed Spherical Parallel Manipulator Assembly
Helicopter Gear Reduction