Home
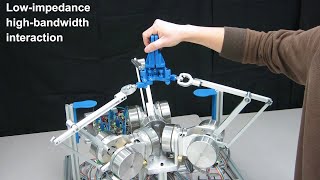
Backdrivable Kinematically Redundant (6+3)-DOF Hybrid Parallel Robot – Part 1: Trajectory Control
Laboratoire de robotique de l'université Laval / Laval University Robotics Laboratory
8 ก.ย. 2020
การดู 171,515 ครั้ง
Backdrivable Kinematically Redundant (6+3)-DOF Hybrid Parallel Robot –Part 2:Human–Robot Interaction
【Full HD】ABENICS: Active Ball Joint Mechanism With Three-DoF Based on Spherical Gear Meshings
A backdrivable 6-dof parallel robot for sensorless dynamically interactive tasks
[พากย์ไทย] แทงก์สุดแกร่ง แห่งวงกต ตอนที่ 4【Ani-One Thailand】
VJ LOOP NEON Colorful Tunnel Compilation Abstract Background Video Lines Pattern 4k Screensaver
T-Flex: Compliant Flexure-based Large Range Precision Hexapod
A Lightweight Modular Segment Design for Tendon-Driven Continuum Robots
Acrome Stewart Platform
What are robot singularities?
Tripteron Robot - Simpler Than It Looks?
I made a DUMMY ROBOTIC ARM from scratch!
The Cubli: a cube that can jump up, balance, and 'walk'
[พากย์ไทย] สกิลโกงไร้เทียมทาน สร้างตำนานในสองโลก 〜ชีวิตพลิกผันด้วยการอัปเลเวล〜 - ตอนที่ 05
Sketchup House Design 6 EXT INT + Enscape 2.4 Realtime Rendering
KINEMATICS | Serial robot vs. Parallel robot (This is not CGI)
Inside US Navy's Massive Indoor Ocean
Gear Types, Design Basics, Applications and More - Basics of Gears
Đồ Án Kỹ Thuật Robot | Nghiên Cứu, Thiết Kế Và Thi Công Robot 6 Bậc Tự Do | 6-DoF Arm Robot | HCMUTE
[พากย์ไทย] น้องโล่สายแทงก์แกร่งเกินร้อย ซีซั่น 2 - ฉบับมัดรวมทุกตอน



![[พากย์ไทย] แทงก์สุดแกร่ง แห่งวงกต ตอนที่ 4【Ani-One Thailand】](https://i.ytimg.com/vi/I-6ZpNnxjz0/mqdefault.jpg)








![[พากย์ไทย] สกิลโกงไร้เทียมทาน สร้างตำนานในสองโลก 〜ชีวิตพลิกผันด้วยการอัปเลเวล〜 - ตอนที่ 05](https://i.ytimg.com/vi/zVBKsJeIDE8/mqdefault.jpg)





![[พากย์ไทย] น้องโล่สายแทงก์แกร่งเกินร้อย ซีซั่น 2 - ฉบับมัดรวมทุกตอน](https://i.ytimg.com/vi/q6nDd8ttXQs/mqdefault.jpg)